
-
摘要:
在过去的几十年里,人工智能(AI)技术迅速发展. 从完成简单任务的自动化设备到具有一定学习能力的智能机器人,AI正以前所未有的速度改变着世界. 但真正的智能不仅仅在于高效处理大量数据和执行预设任务,更在于与环境的深度互动和自适应决策等能力. 这就要求AI系统突破现有模式的多重限制,例如离散符号处理与物理世界连续性之间的根本矛盾,固定特征空间与开放环境无限可能性的相互冲突,以及静态部署方式与动态演化需求的彼此割裂等问题,最终实现自主感知周围环境,主动适应环境变化并完成独立学习和决策,摆脱对人工干预高度的依赖. 本文针对AI与环境的交互技术进行简要综述,讨论当前的进展并展望未来AI系统在环境互动中的创新和应用,以及相应电子材料的发展和未来挑战.
Abstract:Over the past few decades, artificial intelligence (AI) technology has rapidly developed from systems capable of performing simple automated tasks to complex intelligent robots that are reshaping industry and daily life. However, while AI has demonstrated remarkable capabilities in processing vast amounts of data and executing predefined tasks, the essence of true intelligence lies in its ability to interact deeply with dynamic environments and make adaptive decisions in real time. AI systems must transcend their current limitations and evolve into entities that can autonomously perceive, learn, and adapt to their surroundings without relying on human intervention. A notable challenge in achieving this goal is the fundamental contradiction between the discrete symbolic processing methods employed by traditional AI systems and the continuous nature of the physical world. Real-world environments are inherently continuous, with phenomena such as motion, aging, and light variations that unfold seamlessly over time. In contrast, AI systems often rely on discrete representations, such as pixelated images or labeled data points, which inherently fail to capture the subtle, cumulative effects of continuous changes. The disconnect between discrete processing and continuous reality underscores the need for AI systems to develop new paradigms that enable continuous environmental modeling and real-time adaptation. Another critical limitation is in the constrained feature spaces of traditional AI systems, which makes it difficult to handle the infinite possibilities of open environments. Dynamic environments are characterized by an ever-expanding state space in which parameters such as object shapes, lighting conditions, and interactions between entities combine in countless unforeseen ways. Current AI systems, constrained by their predefined feature dimensions, struggle to adapt to novel scenarios outside of their training data. To address this limitation, AI systems must develop elastic cognitive frameworks that can dynamically expand their feature spaces, thereby enabling them to adaptively process unforeseen information. Furthermore, the static deployment model of traditional AI systems poses a barrier to achieving true intelligence. Most AI systems are trained offline and deployed with fixed algorithms, which limit their ability to learn and adapt in real time as they interact with their environments. Intelligent entities must be capable of continuous learning and evolution, updating their knowledge, and decision-making processes based on new experiences. This requires overturning existing static learning paradigms, enabling AI systems to continuously refine their models and adapt to changing circumstances. The future of AI lies in its ability to deeply interact with and adapt to complex and dynamic environments. By addressing the limitations of discrete processing, fixed feature spaces, and static deployment models, and by leveraging advancements in electronic materials, we can pave the way for truly intelligent systems that operate autonomously and evolve alongside their environments. In this paper, we provide a brief overview of the interaction technologies between AI and the environment, discussing current advancements and exploring future innovations and applications of AI in environmental interactions, as well as the challenges from the perspective of electronic materials. It aims to inspire further research and innovation in this transformative field, ultimately unlocking the full potential of AI.
-
人工智能(AI)正迅速成为塑造人类社会的重要力量,从最初的理论构想到如今的深度学习应用,每一次进步都在社会各个方面产生了广泛而深远的影响. 传统的AI技术主要用于替代重复性工作,通过预设的规则和逻辑来执行特定任务. 这些早期的AI系统在特定领域内表现良好,如在工业生产线上的自动化设备,它们可以显著提高效率和准确性. 随着技术的进步,AI开始发展出类似人类的传感能力. 通过集成多种传感器,AI系统可以接收来自外界的数据,能够在一定范围内感知环境中特定信息的变化并准确地进行数据分析,例如计算机视觉技术使得AI能够获取并识别环境中的物体运动等[1−2]. 后来研究人员致力于开发具有一定自主能力的AI系统. 通过引入自动化算法,AI可以在大量数据分析的基础上根据人类预设的条件触发相应的操作,从而实现一定程度的自主性. 例如,自动驾驶汽车可以根据道路和交通状况自动调整速度和方向,工业机器人可以根据生产需求自动执行复杂的组装任务等[3−5]. 近期通过引入人工神经网络等先进算法,AI系统可以不断学习和调整自身行为[6−12]. 例如AlphaGo通过自我对弈不断优化策略,最终战胜了人类顶尖围棋选手,展示了AI在复杂决策环境中的强大学习能力. 这些技术的进步大大扩展了AI的应用范围,使其能够在更多场景中发挥作用.
然而,尽管AI的学习能力以及决策能力已经能使其在许多方面表现出色,但却始终存在着严重限制其进一步发展的瓶颈,即当前的AI系统仍然必须依赖于人工干预,其所有能力均受限于人工预设的算法框架,从数据采集、模型训练到决策执行,每个关键环节都需要人类介入控制. 这意味着AI几乎无法完全独立于人类的指导和监督去完成非设计任务. 即使是最先进的大模型如GPT和DALL-E,也只能依赖于预先设定的训练数据和复杂的算法,并不能实现真正的独立智能. 而存在这一瓶颈的核心原因在于AI基础架构的根本性限制,使其无法对无限连续的真实物理世界产生本质上的理解并且随之不断进化. 首先传统AI的离散处理方式与物理环境的连续性之间存在根本矛盾. 真实物理环境是一个无限维连续体,比如现实场景中的物体运动、材质老化、光影变化等过程,本质上是连续的时间函数,而传统AI符号化处理则是将连续的现实世界强行压缩为离散的符号系统,如图像像素、文字标签,这种离散处理方式无法捕获持续时变参数的微小累积效应,必然会丢失环境中的渐变信息及其动态关联,使其对场景的理解不可避免的偏离真实状态. 真正独立智能需要能够建立与物理世界同构的连续认知框架,而现有离散处理范式只能构建出对现实的近似投影,因此从根本上决定了其无法获得对世界本质的自主理解能力. 其次传统AI的有限表征容量与开放环境的无限可能性存在根本冲突. 动态开放环境的本质特征在于其状态空间的无限延展性,环境参数的组合可能性呈指数级别增长,比如物体形态的改变、光照条件的动态迁移、多实体交互的随机涌现等,共同构成无法预见的参数组合. 对于现有的AI系统来说,当其遭遇训练数据未覆盖的新环境状态时,其固定的特征空间缺乏弹性扩展机制,导致关键信息特征只能被压缩到已有特征的最近似映射中,引发认知失真. 此外真实环境中各要素通过复杂非线性关系相互耦合,而这些耦合效应在AI的特征空间中被解构为孤立参数,如将颜色、纹理、形状分离处理,破坏了环境要素间的本征关联性. 因此传统AI系统仅能感知设计者预先定义的有限“观察窗口”,形成认知的先天性盲区. 这种依赖人工定义感知环境的特性,从根本上否定了独立智能所需的环境适应自主权,无法突破预设框架去发现新维度的环境特征. 最后传统AI硬件架构的静态属性与智能系统的动态演化需求之间也存在根本矛盾. 现有AI系统依赖封闭的“训练–部署”范式,其特征提取器与推理规则在部署后即被冻结,而开放环境的动态性要求智能体必须具备持续的环境认知更新能力. AI系统的这种离线批量学习的范式切断了系统与环境的持续交互通道,将认知过程固化为封闭的静态映射函数,使其在遭遇开放环境持续演化时无法通过实时数据流实现认知更新,导致其对物理世界的建模与环境实际演化进程产生不可逆的偏离,因而这种结构缺陷在深层次上阻断了智能体与环境协同进化的可能性. 这三个维度的架构性矛盾共同决定了传统AI系统只能作为人类预设规则的执行者,而无法突破算法和数据边界实现真正的独立智能.
要实现独立于人类的智能,AI系统不能仅仅依赖于软件层面的设计和优化,而是需要在硬件层面进行革命性的创新. 现有的AI硬件通常只起到支持和执行的作用. 虽然它们在数据处理和计算速度上已经表现非常出色,但始终局限于被动执行任务,依赖程序指令完成操作. 为了突破这一瓶颈,需要开发具备自身智能的硬件设备,构建基于材料本征物理属性的无需外部程序控制即可完成环境信息感知—决策—执行闭环的自主演化系统,实现对物理世界连续动态感知,自主扩展认知维度并与环境实时协同进化. 在这方面,被世界经济论坛评选为十大新兴技术之一的神经形态工程正处于技术发展的前沿[13]. 研究人员正在努力探索如何使这些仿照人脑运行的人工神经突触和人工神经元器件产生智能,从而主动与环境交互. 目前该领域已取得了显著的研究进展,相应的硬件设备突破了原有自适应能力的边界,大大提升了AI系统的智能水平[13−24].
1. 与环境主动交互的神经形态硬件设备
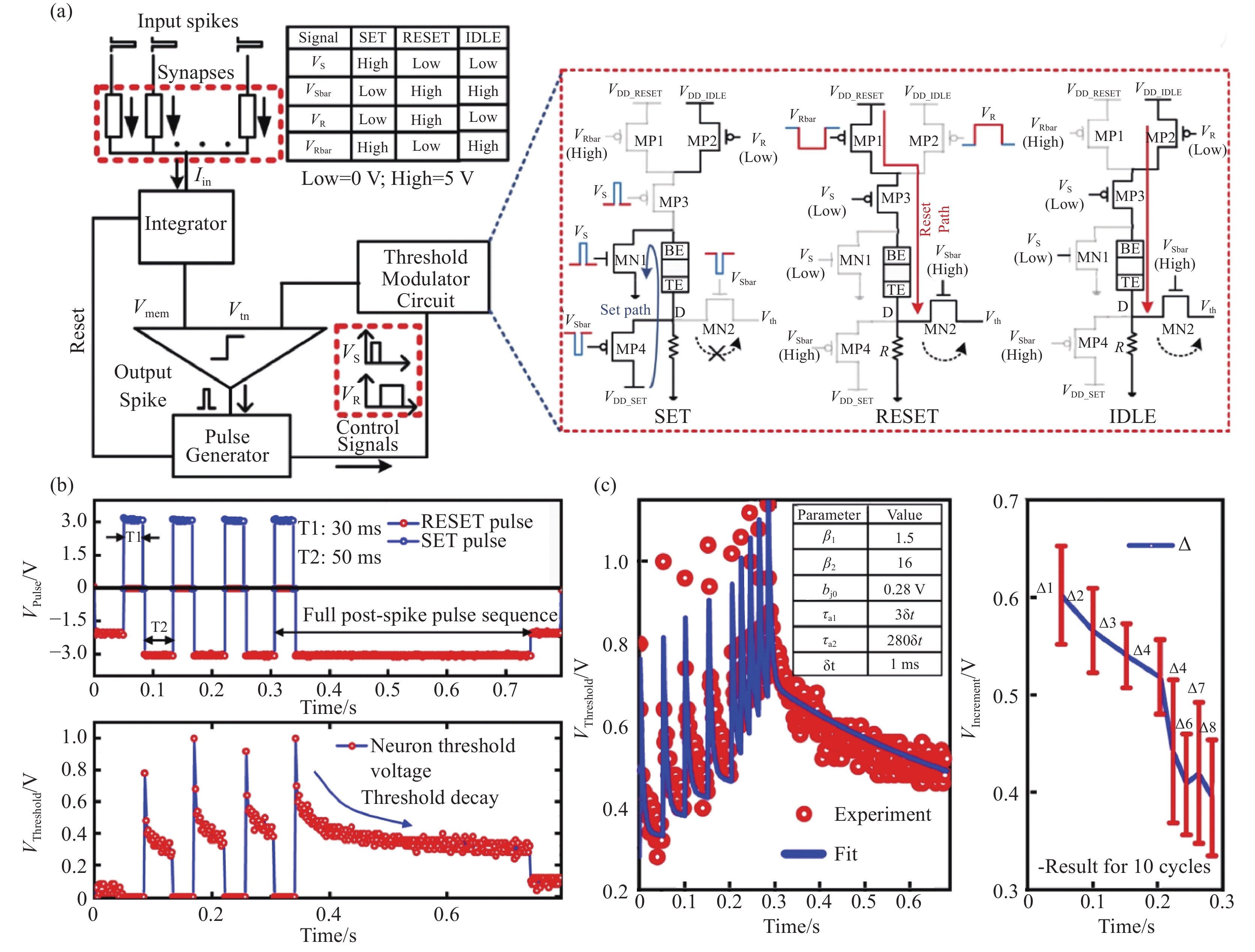
Shaban等[25]开发出一种能够自适应调节激发阈值的人工神经元装置. 这种人工神经元以非丝状氧化物随机存取存储器作为核心组件,并与积分器、比较器等外围电路模块组合而成,实现了不依赖人为干预的神经元器件阈值自适应增加,如图1(a)所示. 在每次设定脉冲结束或复位脉冲开始后,阈值电压会出现一个峰值,之后在复位脉冲期间,阈值电压会以双指数曲线的形式先快速衰落,然后逐渐衰减,如图1(b)所示. 神经元每次激发后,器件会自适应增加下一次的激发阈值,并且阈值电压的增加幅度随着神经元激发次数累积而逐渐减小,使得神经元在每次激发中自主适应不同的输入模式. 如果长时间没有激发,阈值电压会自动持续衰减并回到初始状态,如图1(c)所示. 这种人工神经元不依赖任何软件或者算法展现出了硬件设备主动与环境信号互动的能力,使其在执行具体现实任务时展现出更高的准确率以及更高的效率,比如在时序MNIST分类任务中达到了96.1%的高准确率;在Google语音命令数据集上不但达到了与算法能够实现的最高准确率相媲美的91%,同时神经元数量更是减少了50%~70%. 这种源自硬件的智能展现出了更高的任务完成准确性、更好的灵活性等优势,为复杂环境中的应用提供了强大的支持.
![]() 图 1 一种激发阈值自适应增加的人工神经元. (a)人工神经元装置电路图; (b)在设定脉冲以及复位脉冲的作用下, 神经元的激发阈值发生自适应变化; (c)在外界的不断刺激下神经元的激发阈值自适应增加, 并且增加的幅度随着激发次数的累积而逐渐下降(I表示电流, V表示电压, bj0表示基线阈值电压, β代表比例常数, 调控阈值偏离基线程度, τ代表阈值衰减的自适应时间常数, δt表示最小时间步长)[25]Figure 1. An artificial neuron with adaptively increasing threshold: (a) circuit diagram of the artificial neuron device; (b) under the action of set pulses and reset pulses, the threshold of the neuron undergoes adaptive changes; (c) under continuous external stimulation, the threshold of the neuron adaptively increases, and the magnitude of the increase gradually decreases with the accumulation of firing events (I represents current, V represents voltage, bj0 represents the baseline threshold voltage, β represents the scaling factor that regulates the degree of threshold deviation from baseline, τ represents the adaptation time constant of threshold decay, and δt represents minimum time step) [25]
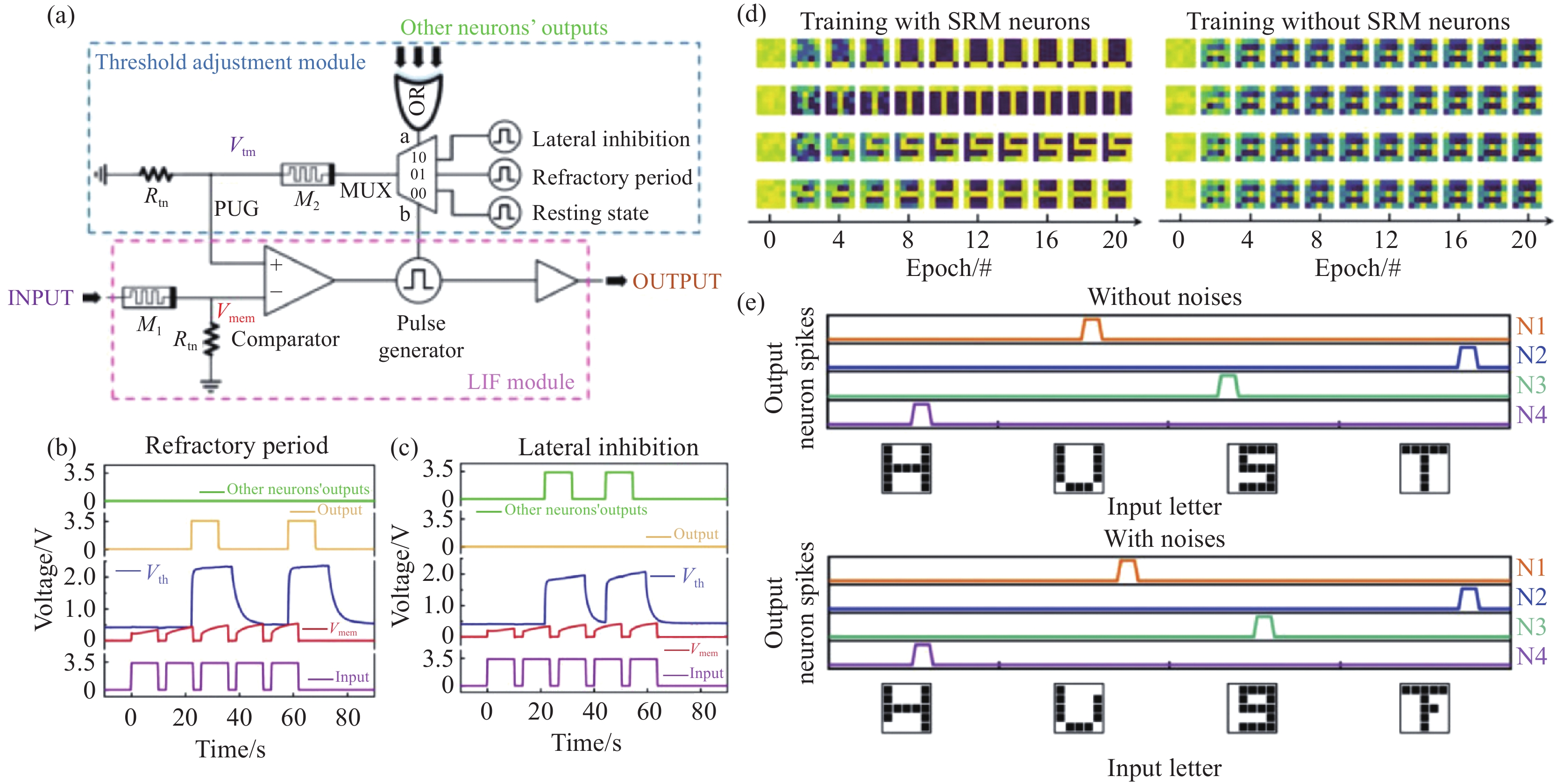
图 1 一种激发阈值自适应增加的人工神经元. (a)人工神经元装置电路图; (b)在设定脉冲以及复位脉冲的作用下, 神经元的激发阈值发生自适应变化; (c)在外界的不断刺激下神经元的激发阈值自适应增加, 并且增加的幅度随着激发次数的累积而逐渐下降(I表示电流, V表示电压, bj0表示基线阈值电压, β代表比例常数, 调控阈值偏离基线程度, τ代表阈值衰减的自适应时间常数, δt表示最小时间步长)[25]Figure 1. An artificial neuron with adaptively increasing threshold: (a) circuit diagram of the artificial neuron device; (b) under the action of set pulses and reset pulses, the threshold of the neuron undergoes adaptive changes; (c) under continuous external stimulation, the threshold of the neuron adaptively increases, and the magnitude of the increase gradually decreases with the accumulation of firing events (I represents current, V represents voltage, bj0 represents the baseline threshold voltage, β represents the scaling factor that regulates the degree of threshold deviation from baseline, τ represents the adaptation time constant of threshold decay, and δt represents minimum time step) [25]Huang等[22]设计了一种能够自适应调整的尖峰响应神经元电路,如图2(a)所示,利用NbOx忆阻器成功模拟了在环境信号的强度、频率变化下突触权重的自适应调整,并使得人工神经元能够根据信号的变化进行自我调节,表现出与生物神经元类似的学习和响应能力. 这种神经元在没有刺激的情况下,阈值保持不变,而当神经元被激发后会自主表现出明显的不应期,进行自保护以免受强烈的刺激,如图2(b)所示. 此外,激发的神经元还将信号传递给相邻神经元以增加其阈值,因此相邻神经元会受到横向抑制,从当前刺激中学习不到任何特征,可以避免信息过载,并支持神经网络进行竞争性学习,如图2(c)所示. 随后研究人员在此硬件上通过无监督SRDP (Spiking-rate dependent plasticity) 学习规则进行训练,成功地对带有噪声的字母“H、U、S、T”进行了准确分类,如图2(d)~(e)所示. 这种在噪声下的自适应识别是传统的LIF (Leaky integrate-and-fire) 神经元模型无法做到的,展现出了硬件在与环境交互过程中优秀的鲁棒性以及容错能力,推动了类脑计算在更复杂的应用场景中的可行性.
![]() 图 2 一种自适应调整的尖峰响应神经元模型. (a)人工神经元及突触装置电路图(R表示电阻, V表示电压, M表示忆阻器); (b)在神经元激发后所产生的不应期; (c)神经元激发后对其他神经元产生的横向抑制; (d)有无自适应神经元的训练过程特征对比; (e)自适应神经元有无噪声情况下进行字母识别的结果[22]Figure 2. An adaptive spiking neuron model: (a) circuit diagram of the artificial neuron and synaptic device (R represents resistance, V represents voltage, and M represents memristor); (b) the refractory period after the neuron spiking; (c) the lateral inhibition effect produced by the neuron spiking on other neurons; (d) comparison of training process characteristics with and without adaptive neurons; (e) results of letter recognition with and without noise in the presence of adaptive neurons[22]
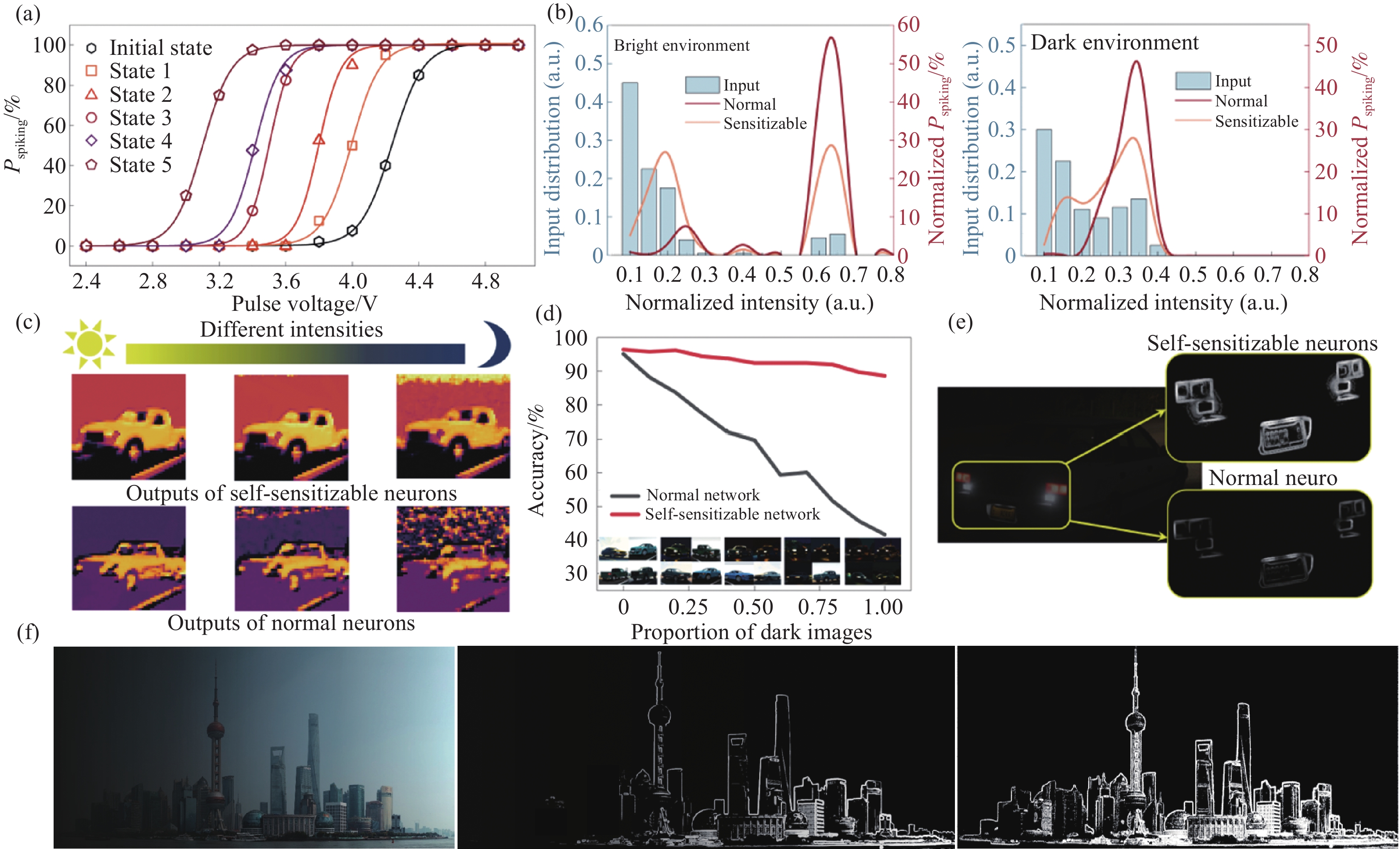
图 2 一种自适应调整的尖峰响应神经元模型. (a)人工神经元及突触装置电路图(R表示电阻, V表示电压, M表示忆阻器); (b)在神经元激发后所产生的不应期; (c)神经元激发后对其他神经元产生的横向抑制; (d)有无自适应神经元的训练过程特征对比; (e)自适应神经元有无噪声情况下进行字母识别的结果[22]Figure 2. An adaptive spiking neuron model: (a) circuit diagram of the artificial neuron and synaptic device (R represents resistance, V represents voltage, and M represents memristor); (b) the refractory period after the neuron spiking; (c) the lateral inhibition effect produced by the neuron spiking on other neurons; (d) comparison of training process characteristics with and without adaptive neurons; (e) results of letter recognition with and without noise in the presence of adaptive neurons[22]值得注意的是,Zhang等[26]构建了一种能够自主调整激活函数来主动感知并处理环境信息的神经形态器件,并且是首次在无任何其他电路元件辅助的情况下实现了这些复杂的神经元自适应功能. 研究人员通过在NdNiO3器件中构建可自适应转变的氢离子浓度梯度,使得器件在动态变化的环境中能够独立自主调整梯度形态从而呈现出灵活多变的激活函数,对不同强度以及不同重要性的环境信息进行自主识别并处理,如图3(a)~(b)所示. 随后研究人员分别进行了不同环境下的车辆分类任务以及边缘识别任务,展现了硬件智能带来的巨大优势. 在不断变化的环境中,这种自适应神经元所支撑的神经网络能够始终保持对于物体的识别能力,使得分类准确率始终保持在90%以上,解决了困扰传统网络许久的数据漂移问题,如图3(c)~(d)所示. 并且在环境亮度发生剧变的边缘识别任务中,这种神经元展现出了前所未有的自适应调节能力,在动态环境中始终保持对主体的准确分辨,如图3(e)~(f)所示. 正是这样巧妙的设计使得人工神经元能够完全不依靠人为干预,自主处理环境中的动态信息,为应对各种未知的环境提供了有效支持. 同时这种全新器件的诞生意味着人工神经元从此能够表现出与真实生物神经元类似的激发能力的动态调节,也标志着AI向生物级智能迈出了重要的一步.
![]() 图 3 一种自适应调整激活函数的人工神经元及其功能特性. (a)神经元激活函数的自适应转变, 展现出灵活的响应状态, 其中Pspiking为神经元激发概率; (b)自适应神经元与传统神经元在处理不同环境下的任务时激发概率的区别, 说明自适应神经元能够自主调整自身状态以应对不同环境下信息分布的差异; (c)自适应神经元能够在变化的环境中始终保持对于主体的识别能力; (d)进行不同环境下的车辆分类任务时自适应神经元所支撑的脉冲神经网络能够始终保持高准确率; (e)~(f)在边缘识别任务中, 自适应神经元展现出对于动态环境的优秀自适应能力, 能够在变化的环境中感知并处理更多边缘结构信息[26]Figure 3. An artificial neuron with adaptive activation functions and its functional characteristics: (a) the adaptive transformation of the neuron’s activation function, demonstrating flexible response states. Pspiking represents the probability of neuronal spiking; (b) the difference in spiking probabilities between adaptive neurons and traditional neurons when processing tasks in different environments, illustrating that adaptive neurons can autonomously adjust their states to cope with variations in information distribution across environments; (c) adaptive neurons can consistently maintain recognition capabilities for subjects in changing environments; (d) in vehicle classification tasks across different environments, the spiking neural network supported by adaptive neurons can consistently achieve high accuracy; (e)–(f) in edge detection tasks, adaptive neurons exhibit excellent adaptability to dynamic environments, enabling the perception and processing of more edge structure information in changing conditions[26]
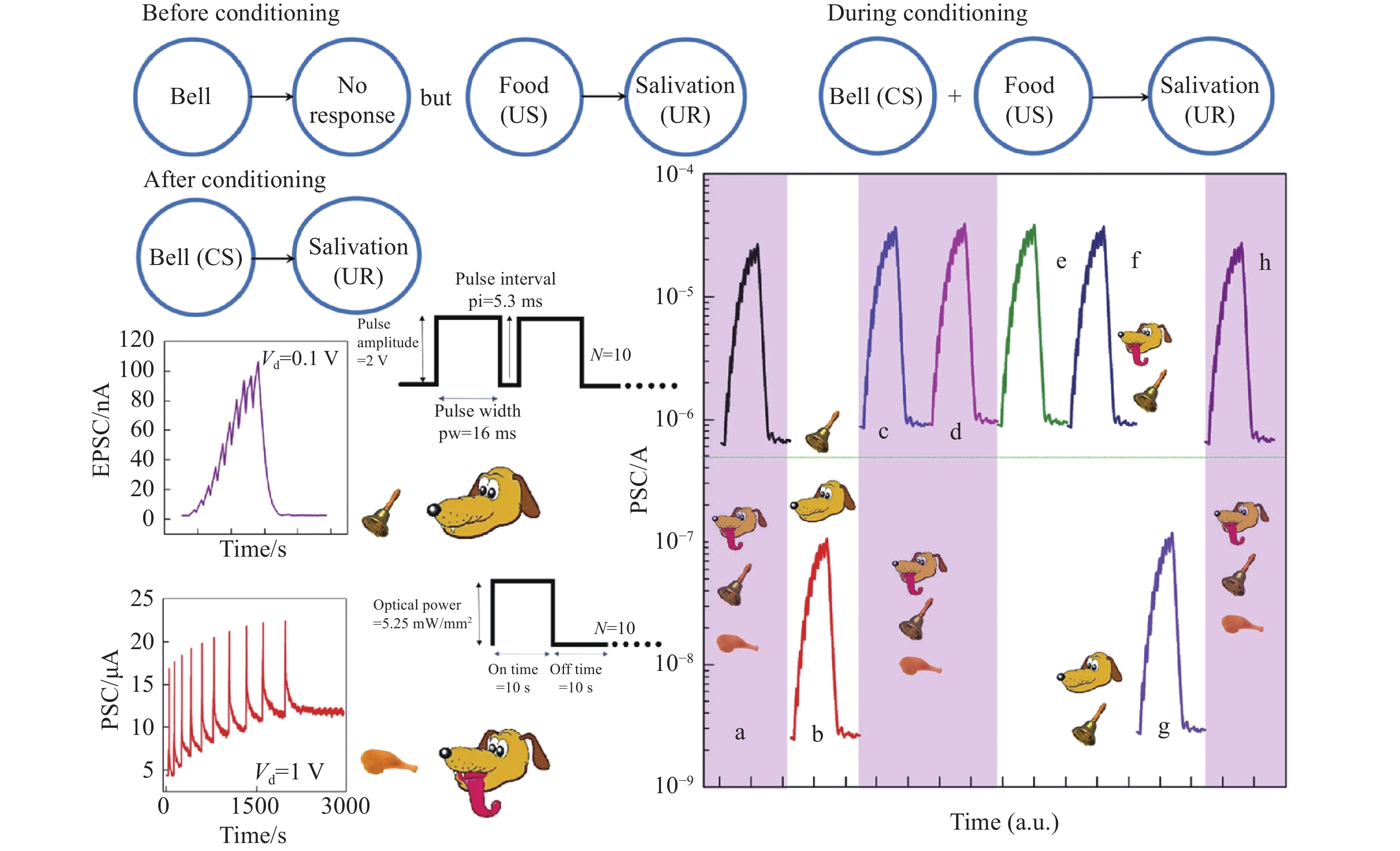
图 3 一种自适应调整激活函数的人工神经元及其功能特性. (a)神经元激活函数的自适应转变, 展现出灵活的响应状态, 其中Pspiking为神经元激发概率; (b)自适应神经元与传统神经元在处理不同环境下的任务时激发概率的区别, 说明自适应神经元能够自主调整自身状态以应对不同环境下信息分布的差异; (c)自适应神经元能够在变化的环境中始终保持对于主体的识别能力; (d)进行不同环境下的车辆分类任务时自适应神经元所支撑的脉冲神经网络能够始终保持高准确率; (e)~(f)在边缘识别任务中, 自适应神经元展现出对于动态环境的优秀自适应能力, 能够在变化的环境中感知并处理更多边缘结构信息[26]Figure 3. An artificial neuron with adaptive activation functions and its functional characteristics: (a) the adaptive transformation of the neuron’s activation function, demonstrating flexible response states. Pspiking represents the probability of neuronal spiking; (b) the difference in spiking probabilities between adaptive neurons and traditional neurons when processing tasks in different environments, illustrating that adaptive neurons can autonomously adjust their states to cope with variations in information distribution across environments; (c) adaptive neurons can consistently maintain recognition capabilities for subjects in changing environments; (d) in vehicle classification tasks across different environments, the spiking neural network supported by adaptive neurons can consistently achieve high accuracy; (e)–(f) in edge detection tasks, adaptive neurons exhibit excellent adaptability to dynamic environments, enabling the perception and processing of more edge structure information in changing conditions[26]John等[27]报告了一种具有自适应能力的人工神经突触,这种突触仅通过硬件即可模仿经典的“巴甫洛夫的狗”条件反射和联想学习模式. 研究人员通过MoS2三端神经形态晶体管实现了类似人脑神经突触的长期可塑性、短期可塑性以及尖峰时间依赖性可塑性等,并展示了完全基于硬件的联想学习. 通过电脉冲模仿摇铃的过程,通过光脉冲模仿了摄食行为,在40个周期内对晶体管施加这些刺激,研究人员成功建立了光脉冲和电脉冲之间的有效关联,如图4所示. 电脉冲和光脉冲作为输入信号,分别影响器件的电导率和离子迁移,从而模拟了生物神经网络中的条件反射和联想学习过程. 这种互动不仅展示了硬件对环境刺激的自适应能力,还体现了硬件与环境之间的动态调整和反馈机制. 通过这种互动,硬件实现了自主感知并理解环境中的信息,进而实现类似于生物神经系统的智能功能.
![]() 图 4 一种具备自适应能力的人工神经突触实现了联想学习, 通过对晶体管施加电脉冲模拟摇铃过程, 并利用光脉冲模拟摄食行为, 在40个周期内成功建立了光脉冲与电脉冲之间的有效关联(V表示电压, N表示刺激次数. CS表示条件刺激, US表示非条件刺激, UR表示无条件反应, PSC表示突触后电流, EPSC表示兴奋性突触后电流)[27]Figure 4. An artificial synapse device with adaptive capabilities achieves associative learning, researchers applied electrical pulses to the transistor to simulate the process of ringing a bell and utilized optical pulses to mimic feeding behavior, successfully establishing an effective association between optical and electrical pulses within 40 cycles (V represents voltage, N represents the number of stimuli, CS represents conditioned stimulus, US represents unconditioned stimulus, UR represents unconditioned response, PSC represents postsynaptic current, and EPSC represents excitatory postsynaptic current)[27]
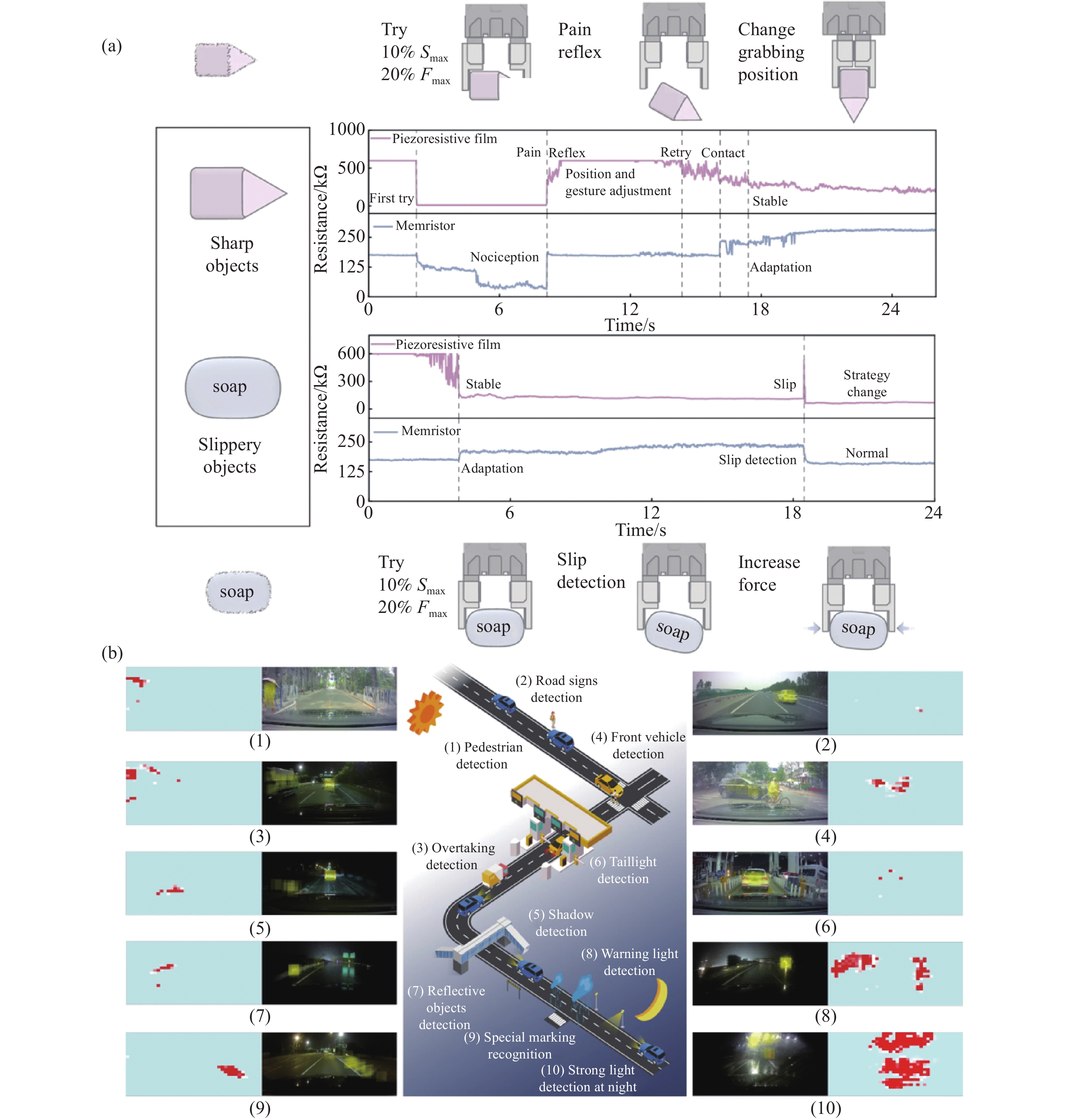
图 4 一种具备自适应能力的人工神经突触实现了联想学习, 通过对晶体管施加电脉冲模拟摇铃过程, 并利用光脉冲模拟摄食行为, 在40个周期内成功建立了光脉冲与电脉冲之间的有效关联(V表示电压, N表示刺激次数. CS表示条件刺激, US表示非条件刺激, UR表示无条件反应, PSC表示突触后电流, EPSC表示兴奋性突触后电流)[27]Figure 4. An artificial synapse device with adaptive capabilities achieves associative learning, researchers applied electrical pulses to the transistor to simulate the process of ringing a bell and utilized optical pulses to mimic feeding behavior, successfully establishing an effective association between optical and electrical pulses within 40 cycles (V represents voltage, N represents the number of stimuli, CS represents conditioned stimulus, US represents unconditioned stimulus, UR represents unconditioned response, PSC represents postsynaptic current, and EPSC represents excitatory postsynaptic current)[27]Wang等[23]通过神经元与神经突触的组合,构建了一个完整的自适应神经形态感知系统,从而使神经网络能够以良好的准确性、适应性和通用性来理解和适应非结构化环境. 这种感知系统的自适应能力在物体抓取和自动驾驶两个应用场景中得到了证实. 在物体抓取任务中,由于未知物体可能会具有尖锐或光滑等不同属性,前者可能会损坏接触端,而后者在保持物体稳定和变形之间的平衡时,给传感和计算模块带来了较大的难度. 基于这种感知系统实现的机械手能够自主感知物体特征,进行快速(~1 ms)适应并实现安全稳定的抓取,如图5(a)演示了对于尖锐不规则物体以及肥皂的自适应抓取过程. 而在自动驾驶场景中,这种自适应感知系统能够自主有效应对不同的环境条件,如光照变化、天气变化以及道路动态情况. 该系统在城市街道、高速公路和恶劣天气下的自动驾驶测试中表现出色,能够准确地识别对象并做出决策,如图5(b)所示展示了几种包含重要决策信息的代表性场景的识别情况,如行人检测、道路标志检测等. 最终在不同动态环境下决策准确率达到94%. 这种自感知系统显著提高了AI的自适应能力和决策精度,使其能够在复杂和动态的环境中维持高性能.
![]() 图 5 一种自适应神经形态感知系统. (a)在物体抓取任务中面对不同特征的物体的自适应抓取过程, Smax代表最大允许接触刺激强度, Fmax表示抓取的最大输出力; (b)自动驾驶过程中对代表性场景的识别情况. 包括行人检测、道路标志检测、超车检测、前车检测、阴影检测、尾灯检测、反射物体检测、警示灯检测、特殊标记识别、夜间强光检测[23]Figure 5. An adaptive neuromorphic perception system: (a) the adaptive grasping process when facing objects with different characteristics in a grasping task. Smax represents the maximum allowable intensity of contact stimulation, and Fmax represents the maximum output force for grasping; (b) the recognition of representative scenarios during autonomous driving, including pedestrian detection, road sign detection, overtaking detection, leading vehicle detection, shadow detection, taillight detection, reflective object detection, warning light detection, special marker recognition, and nighttime glare detection[23]
图 5 一种自适应神经形态感知系统. (a)在物体抓取任务中面对不同特征的物体的自适应抓取过程, Smax代表最大允许接触刺激强度, Fmax表示抓取的最大输出力; (b)自动驾驶过程中对代表性场景的识别情况. 包括行人检测、道路标志检测、超车检测、前车检测、阴影检测、尾灯检测、反射物体检测、警示灯检测、特殊标记识别、夜间强光检测[23]Figure 5. An adaptive neuromorphic perception system: (a) the adaptive grasping process when facing objects with different characteristics in a grasping task. Smax represents the maximum allowable intensity of contact stimulation, and Fmax represents the maximum output force for grasping; (b) the recognition of representative scenarios during autonomous driving, including pedestrian detection, road sign detection, overtaking detection, leading vehicle detection, shadow detection, taillight detection, reflective object detection, warning light detection, special marker recognition, and nighttime glare detection[23]2. 新型神经形态计算材料
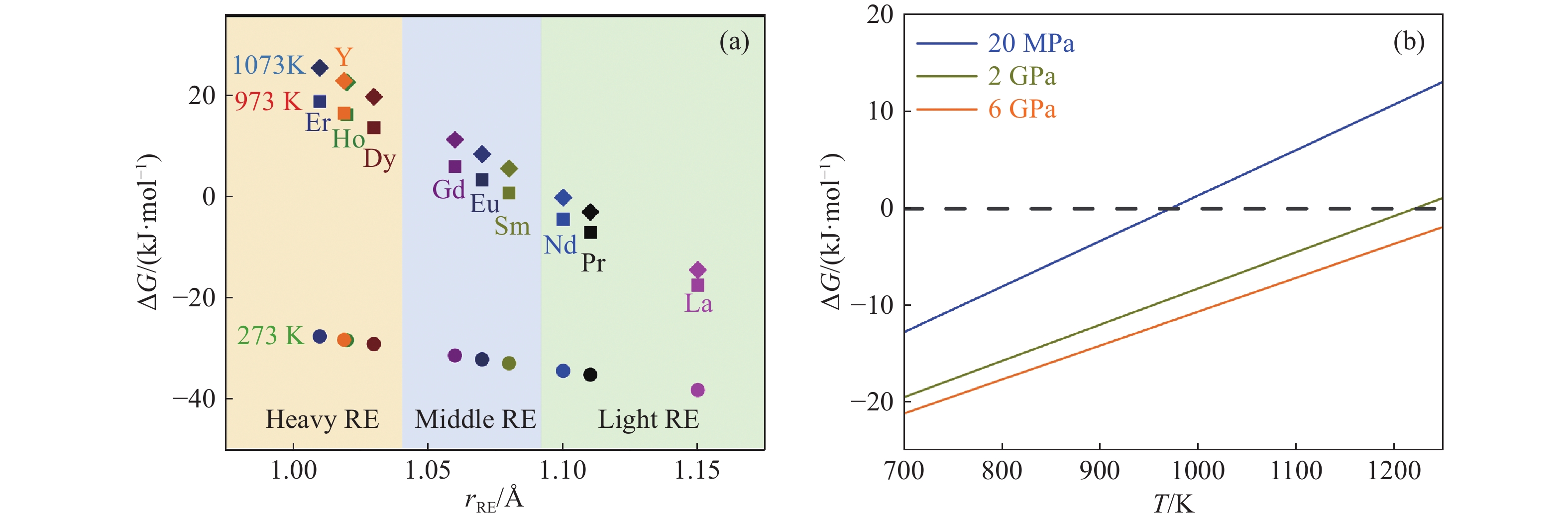
全新的AI器件通过硬件的固有属性实现与环境之间的互动,因此如何模拟复杂的神经形态运行模式对未来电子材料的发展提出了重大挑战. 除了电子器件和神经网络领域的创新,探索新型材料对于硬件智能的进步也至关重要. 例如,Zhang等[26]工作中所应用到的NdNiO3属于典型的稀土镍基氧化物(RENiO3,RE为稀土元素),是一种d电子强关联过渡族金属氧化物半导体材料,通过调控其电子结构可实现其多重电子态的可逆转变,如温致相变、氢致相变等. 温致相变指在特定触发温度(TMIT)下RENiO3发生键长歧化(或电荷歧化),即由金属相的3d8L(L为配位体空穴)电子构型转变为绝缘相的d8和d8L2电子构型(或由金属相的Ni3+$ {\mathrm{t}}_{2\mathrm{g}}^{6}{\mathrm{e}}_{\mathrm{g}}^{1} $转变为绝缘相的Ni3±δ$ {\mathrm{t}}_{2\mathrm{g}}^{6}{\mathrm{e}}_{\mathrm{g}}^{1\pm \delta } $)并伴随结构变化,进一步改变RENiO3中稀土元素离子半径可实现100~600 K宽温区内TMIT的连续调控. 氢致相变则是指通过质子掺杂改变RENiO3中Ni元素价态,即从低电阻的Ni3+$ {\mathrm{t}}_{2\mathrm{g}}^{6}{\mathrm{e}}_{\mathrm{g}}^{1} $电子巡游态转变为高电阻的Ni2+$ {\mathrm{t}}_{2\mathrm{g}}^{6}{\mathrm{e}}_{\mathrm{g}}^{2} $电子局域态. 然而相比于传统半导体氧化物,除LaNiO3外RENiO3在室温下均处于热力学亚稳相状态,并在高温时具有正向的合成吉布斯自由能(ΔG)[28],如图6所示,随着稀土离子半径(rRE)逐渐减小(例如从Pr至Er),ΔG逐渐增加,为实现RENiO3的成功合成,通常需要较高的氧气气氛压力或机械高压.
![]() 图 6 热力学亚稳态RENiO3. (a)在三种不同温度下, RENiO3的生成吉布斯自由能与稀土半径的关系; (b) DyNiO3在不同合成条件下的ΔG随温度的变化关系[28]Figure 6. Thermodynamic metastability of RENiO3: (a) the relationship between the Gibbs free energy of RENiO3 and the radius of rare earth elements at three different temperatures; (b) the relationship between ΔG and temperature for DyNiO3 under different synthesis conditions[28]
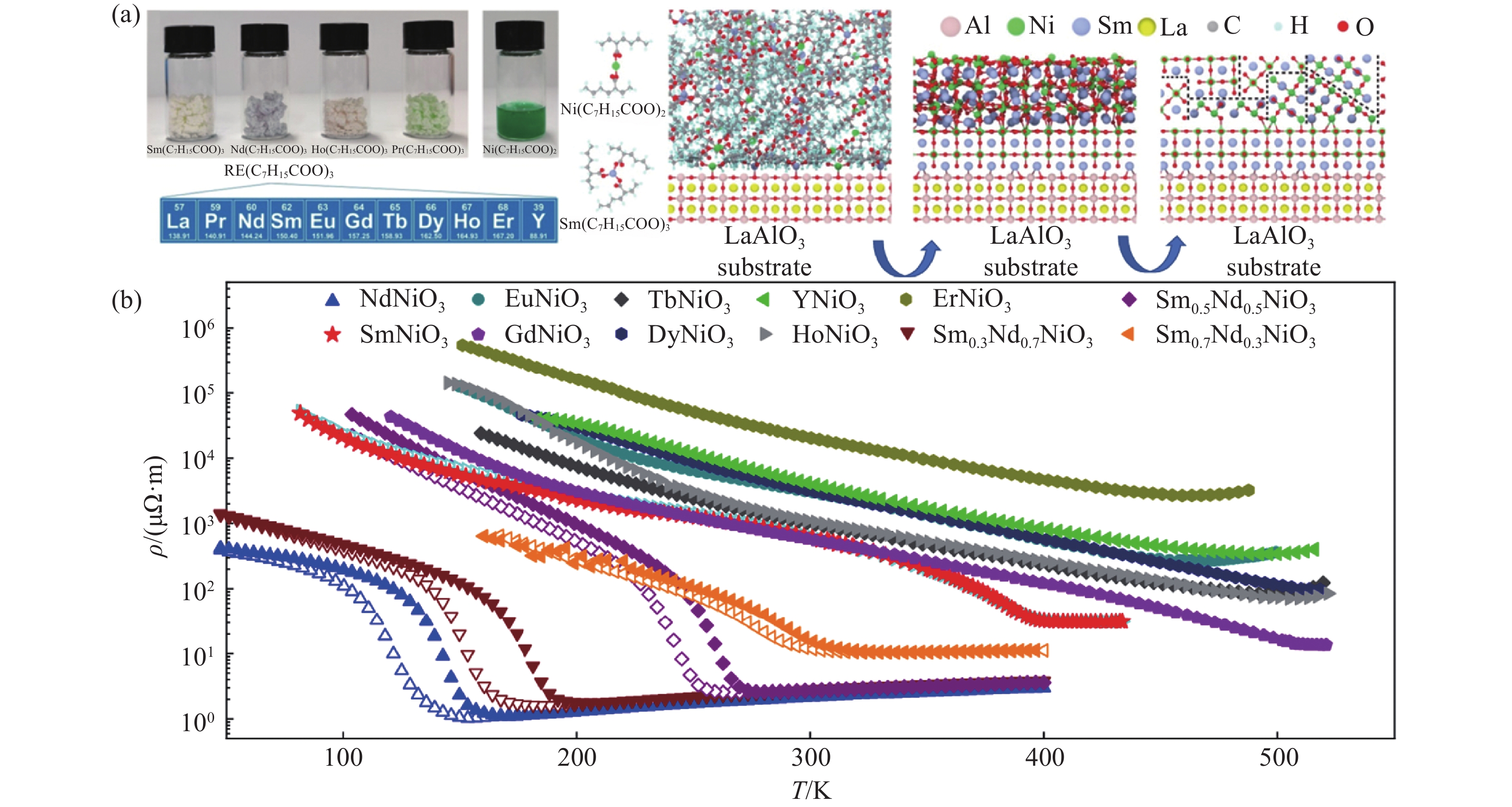
图 6 热力学亚稳态RENiO3. (a)在三种不同温度下, RENiO3的生成吉布斯自由能与稀土半径的关系; (b) DyNiO3在不同合成条件下的ΔG随温度的变化关系[28]Figure 6. Thermodynamic metastability of RENiO3: (a) the relationship between the Gibbs free energy of RENiO3 and the radius of rare earth elements at three different temperatures; (b) the relationship between ΔG and temperature for DyNiO3 under different synthesis conditions[28]一种常见的合成方法为脉冲激光沉积(PLD),通常用于轻稀土元素RENiO3的合成[29],例如PrNiO3、NdNiO3、SmNiO3等,另一种有效制备RENiO3的方法为磁控溅射[30−31]. 然而以上两种方法无法成功合成中、重稀土元素RENiO3,这主要是由于更小的稀土离子半径导致更高的ΔG. 为解决上述问题,研究人员采用了一种新型高压辅助旋涂化学生长方法生长RENiO3薄膜[32],与真空沉积方法(如PLD、磁控溅射或金属有机化学气相沉积)相比,这种基于湿化学和高压固相反应的方法具有成本低、无需真空等优势,并且该方法实现了稀土组分(如NdNiO3、SmNiO3、EuNiO3、GdNiO3、Sm1−xNdxNiO3、Sm1−xEuxNiO3、Sm1−yNdxEuyNiO3和Sm1−yNdxGdyNiO3等)的广泛调节. 此外研究人员还进一步采用金属有机分解方法制备RENiO3薄膜[33],如图7(a)所示,通过该方法合成了一系列Nd、Sm、Eu、Gd、Tb、Dy、Ho和Er等稀土组分的RENiO3薄膜,厚度达到约80 nm. 并且该方法制备的小稀土离子半径GdNiO3薄膜能够表现出明显的金属–绝缘体温致相变特性,如图7(b)所示.
![]() 图 7 金属有机分解方法制备RENiO3. (a)金属有机分解方法示意图, 稀土和镍金属的异辛酸有机前驱体混合后旋涂在LaAlO3(001)衬底上, 高氧压退火后靠近衬底表面的前驱体被分解共格生长形成准单晶层, 而位于衬底表面较远的前驱体则进一步生长为多晶RENiO3; (b)通过高氧压力辅助金属有机分解方法生长的RENiO3/LaAlO3(001)的电阻率(ρ)随温度的变化[33]Figure 7. Preparation of RENiO3 using the metal-organic decomposition method: (a) schematic of the metal-organic decomposition method, where the organic precursors of rare earth and nickel metals are mixed and spin-coated onto a LaAlO3(001) substrate. After high-oxygen-pressure annealing, the precursors near the substrate surface decompose and grow coherently to form a quasi-single-crystal layer, while the precursors farther from the substrate surface further grow into polycrystalline RENiO3; (b) the temperature-dependent resistivity (ρ) of RENiO3/LaAlO3(001) grown using the high-oxygen-pressure-assisted metal-organic decomposition method[33]
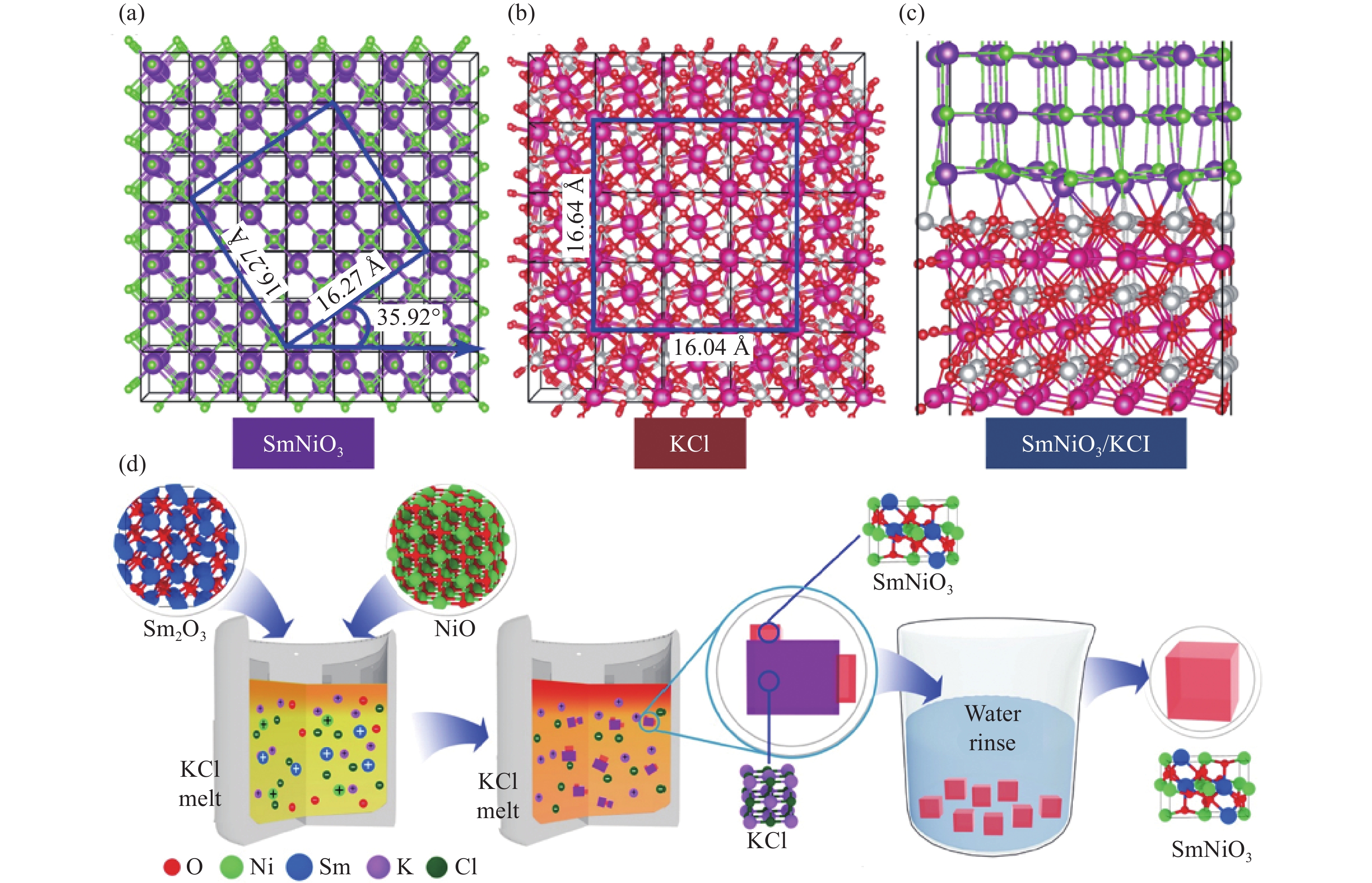
图 7 金属有机分解方法制备RENiO3. (a)金属有机分解方法示意图, 稀土和镍金属的异辛酸有机前驱体混合后旋涂在LaAlO3(001)衬底上, 高氧压退火后靠近衬底表面的前驱体被分解共格生长形成准单晶层, 而位于衬底表面较远的前驱体则进一步生长为多晶RENiO3; (b)通过高氧压力辅助金属有机分解方法生长的RENiO3/LaAlO3(001)的电阻率(ρ)随温度的变化[33]Figure 7. Preparation of RENiO3 using the metal-organic decomposition method: (a) schematic of the metal-organic decomposition method, where the organic precursors of rare earth and nickel metals are mixed and spin-coated onto a LaAlO3(001) substrate. After high-oxygen-pressure annealing, the precursors near the substrate surface decompose and grow coherently to form a quasi-single-crystal layer, while the precursors farther from the substrate surface further grow into polycrystalline RENiO3; (b) the temperature-dependent resistivity (ρ) of RENiO3/LaAlO3(001) grown using the high-oxygen-pressure-assisted metal-organic decomposition method[33]除了薄膜材料,近年来RENiO3粉体和陶瓷材料的生长技术也取得了显著进展. RENiO3粉体材料首次在1971年成功合成[34],此后研究人员将前驱体氧化物或硝酸盐溶解于硝酸或柠檬酸中,加热分解后在氧气气氛中反应成功得到RENiO3粉末[35−37]. 这种方法实现了RENiO3在非机械压力下的成功合成,降低了合成所需的温度和压力. 近年来,研究人员通过引入熔盐法辅助异质形核方法进一步优化了合成条件[38−39],如图8所示. 这种方法实现了RENiO3的批量合成,并进一步降低了合成条件,以GdNiO3粉体为例,与文献中采用的氧气压力相比降低了接近一个数量级(由90 MPa降至10 MPa)[35]. 并且研究人员进一步采用KCl–LiCl共晶熔盐辅助异质沉淀方法,成功实现了重稀土RENiO3(如DyNiO3、HoNiO3、YNiO3)的批量合成,并将合成压力从2~6 GPa机械压力降低到10 MPa以下氧气压力,同时将合成温度从900 ℃降低到600 ℃.
![]() 图 8 熔盐法制备RENiO3. (a) KCl(001)表面俯视图; (b) SmNiO3(010)表面的俯视图; (c) SmNiO3(010)/KCl(001)界面的侧视图; (d) KCl熔盐辅助的异质成核过程及RENiO3合成方法示意图[38]Figure 8. Preparation of RENiO3 using the molten salt method: (a) top view of the KCl(001) surface; (b) top view of the SmNiO3(010) surface; (c) side view of the SmNiO3(010)/KCl(001) interface; (d) schematic of the RENiO3 synthesis method based on KCl molten salt-assisted heterogeneous nucleation process[38]
图 8 熔盐法制备RENiO3. (a) KCl(001)表面俯视图; (b) SmNiO3(010)表面的俯视图; (c) SmNiO3(010)/KCl(001)界面的侧视图; (d) KCl熔盐辅助的异质成核过程及RENiO3合成方法示意图[38]Figure 8. Preparation of RENiO3 using the molten salt method: (a) top view of the KCl(001) surface; (b) top view of the SmNiO3(010) surface; (c) side view of the SmNiO3(010)/KCl(001) interface; (d) schematic of the RENiO3 synthesis method based on KCl molten salt-assisted heterogeneous nucleation process[38]稀土镍基氧化物复杂的电子构型为探索适用于神经形态器件等新型逻辑器件的原理与结构开启了新篇章. 随着材料合成技术的不断革新,具有类似特性的新型强关联半导体材料同样不断推动AI的进一步发展. 通过利用这些全新材料的独特特性,有望能够实现硬件设备与环境信号的直接耦合,将与环境交互和信息处理的物理过程统一于材料本征动力学,即材料的本征物理响应直接构成环境信息的编码、存储与计算过程. 例如VO2表现出氢致相变、光致相变等特性,能够直接响应温度信号、电信号、光信号等多种环境信息,实现外部信号到器件电导状态的直接物理编码,其阻态变化本身就是对外场信号的物理记录,而非对现实的数学近似. 并且其相变路径中存在的中间亚稳态为实现多级感知和记忆提供了物理载体. 这些独特特性极大地拓展了其在神经形态计算领域的相关应用[40−41];NiO在H2气氛中空穴被电子填充导致电阻增加,在O3气氛中空穴增加电阻降低,成功模拟敏感化和习惯化[42];在NbO2中通过负微分电阻以及电致相变等特性生成多种类神经脉冲行为,利用电场诱导的氧空位通道,形成与局域焦耳热效应的非线性竞争过程等材料本征的复杂相变动力学,使得硬件设备能够基于物理特性实现超越预设算法的环境适应能力[43−44]. 这些强关联半导体材料表现出外场触发下的多重电子态,实现了多种自适应的工作模式,为类脑器件的研制提供了材料基础. 然而,为满足未来独立智能的复杂运算功能,新型电子材料或新型电子态仍有待进一步探索.
3. 结论
综上所述,AI在硬件与环境交互方面正在经历前所未有的变革,并展现出巨大的创新和应用潜力. 当前神经形态工程领域的发展为实现硬件智能提供了新的方向,通过引入能够自主感知和自适应环境变化的神经形态器件,初步展现出了不再依赖人为干预的更高智能. 但要真正实现基于硬件智能的AI系统,仍然是一个长期且艰巨的挑战. 最重要的一点在于,未来需要开发出基于材料本征物理属性的环境信息感知—决策—执行闭环的硬件智能. 这就要求首先能够构建基于硬件的连续认知突破离散化困境,利用材料本征动力学过程作为连续认知的基础,将环境参数的连续变化完整映射至硬件的状态空间中,从根本上消解传统离散化框架对物理世界连续性的解构. 其次要求具备自身智能的硬件设备能够通过特征空间的自适应调整突破有限容量的约束,利用材料的自适应特性机制,使得智能系统能够超越预设特征空间的刚性边界,在遭遇未知环境刺激时,通过材料本征物理响应自发生成与环境参数相适应的表征,实现不需要依赖软件算法的自主拓展能力. 此外还要求具备自身智能硬件的认知框架能够与环境协同进化突破静态性束缚,将环境的不同刺激直接编码为硬件材料本征状态的调整,在物理层面实现认知模型与环境参数的实时协同演化. 这样将智能体的认知框架深植于材料物理特性的自适应动力学中,能够突破传统软件算法与物理世界交互的屏障,使得认知模型的更新过程与物理环境演化保持同构性,真正实现智能系统与环境规律的协同进化. 这样具有自身智能的硬件设备将能够自主并且更加精准高效地感知和处理环境信息,是未来AI独立学习、记忆以及自主决策能力的重要基础.
而这些硬件智能所需的自适应性材料在设计、制备和加工等方面正面临着巨大挑战. 未来的材料需要能够应对外界复杂的环境变化,自主调整其物理或化学特性,以实现类似生物的自适应能力. 这就需要研究人员在进行材料设计时充分考虑到其对外界刺激的高度敏感性和超快响应能力,使其能够精准并快速地识别环境信号,还需兼顾材料的动态自主调控能力,使其能够根据环境自适应调整响应状态以处理复杂的动态信息,此外还需考虑到与现有的微电子器件间的兼容性和集成性等. 并且实现这一目标涉及诸多科学和工程难题,如器件可扩展性问题,神经形态器件的动力学特性在阵列化集成时会引发多级非线性耦合效应,导致系统级智能行为难以从单器件特性进行线性外推,产生无法预测的畸变累积困境. 对于器件功能稳定性来说,材料本征智能的实现需要保持对外界信息的高敏感性,但这又可能使得器件功能参数在真实场景中易受环境干扰而发生不可控的偏移,大幅降低其可靠性. 在互联架构方面,神经形态硬件的连续时间动力学特性与现有数字系统的时钟同步机制存在根本性冲突,导致信号转换中遭遇时序失真等困境. 这些问题需要多学科交叉的深入研究和创新,要求包括材料科学、化学、物理、电子工程等领域的专家共同努力,系统性地研究并解决自适应性材料在设计、制备以及加工等方面的挑战. 总之,硬件驱动的AI与环境交互是未来AI系统发展的重要方向,这将极大地推动其在无人驾驶、智能制造、医疗诊断以及太空探索等领域的应用,显著提升系统的自适应性和智能性,为各领域带来变革性的进步.
-
![]()
图 1 一种激发阈值自适应增加的人工神经元. (a)人工神经元装置电路图; (b)在设定脉冲以及复位脉冲的作用下, 神经元的激发阈值发生自适应变化; (c)在外界的不断刺激下神经元的激发阈值自适应增加, 并且增加的幅度随着激发次数的累积而逐渐下降(I表示电流, V表示电压, bj0表示基线阈值电压, β代表比例常数, 调控阈值偏离基线程度, τ代表阈值衰减的自适应时间常数, δt表示最小时间步长)[25]
Figure 1. An artificial neuron with adaptively increasing threshold: (a) circuit diagram of the artificial neuron device; (b) under the action of set pulses and reset pulses, the threshold of the neuron undergoes adaptive changes; (c) under continuous external stimulation, the threshold of the neuron adaptively increases, and the magnitude of the increase gradually decreases with the accumulation of firing events (I represents current, V represents voltage, bj0 represents the baseline threshold voltage, β represents the scaling factor that regulates the degree of threshold deviation from baseline, τ represents the adaptation time constant of threshold decay, and δt represents minimum time step) [25]
![]()
图 2 一种自适应调整的尖峰响应神经元模型. (a)人工神经元及突触装置电路图(R表示电阻, V表示电压, M表示忆阻器); (b)在神经元激发后所产生的不应期; (c)神经元激发后对其他神经元产生的横向抑制; (d)有无自适应神经元的训练过程特征对比; (e)自适应神经元有无噪声情况下进行字母识别的结果[22]
Figure 2. An adaptive spiking neuron model: (a) circuit diagram of the artificial neuron and synaptic device (R represents resistance, V represents voltage, and M represents memristor); (b) the refractory period after the neuron spiking; (c) the lateral inhibition effect produced by the neuron spiking on other neurons; (d) comparison of training process characteristics with and without adaptive neurons; (e) results of letter recognition with and without noise in the presence of adaptive neurons[22]
![]()
图 3 一种自适应调整激活函数的人工神经元及其功能特性. (a)神经元激活函数的自适应转变, 展现出灵活的响应状态, 其中Pspiking为神经元激发概率; (b)自适应神经元与传统神经元在处理不同环境下的任务时激发概率的区别, 说明自适应神经元能够自主调整自身状态以应对不同环境下信息分布的差异; (c)自适应神经元能够在变化的环境中始终保持对于主体的识别能力; (d)进行不同环境下的车辆分类任务时自适应神经元所支撑的脉冲神经网络能够始终保持高准确率; (e)~(f)在边缘识别任务中, 自适应神经元展现出对于动态环境的优秀自适应能力, 能够在变化的环境中感知并处理更多边缘结构信息[26]
Figure 3. An artificial neuron with adaptive activation functions and its functional characteristics: (a) the adaptive transformation of the neuron’s activation function, demonstrating flexible response states. Pspiking represents the probability of neuronal spiking; (b) the difference in spiking probabilities between adaptive neurons and traditional neurons when processing tasks in different environments, illustrating that adaptive neurons can autonomously adjust their states to cope with variations in information distribution across environments; (c) adaptive neurons can consistently maintain recognition capabilities for subjects in changing environments; (d) in vehicle classification tasks across different environments, the spiking neural network supported by adaptive neurons can consistently achieve high accuracy; (e)–(f) in edge detection tasks, adaptive neurons exhibit excellent adaptability to dynamic environments, enabling the perception and processing of more edge structure information in changing conditions[26]
![]()
图 4 一种具备自适应能力的人工神经突触实现了联想学习, 通过对晶体管施加电脉冲模拟摇铃过程, 并利用光脉冲模拟摄食行为, 在40个周期内成功建立了光脉冲与电脉冲之间的有效关联(V表示电压, N表示刺激次数. CS表示条件刺激, US表示非条件刺激, UR表示无条件反应, PSC表示突触后电流, EPSC表示兴奋性突触后电流)[27]
Figure 4. An artificial synapse device with adaptive capabilities achieves associative learning, researchers applied electrical pulses to the transistor to simulate the process of ringing a bell and utilized optical pulses to mimic feeding behavior, successfully establishing an effective association between optical and electrical pulses within 40 cycles (V represents voltage, N represents the number of stimuli, CS represents conditioned stimulus, US represents unconditioned stimulus, UR represents unconditioned response, PSC represents postsynaptic current, and EPSC represents excitatory postsynaptic current)[27]
![]()
图 5 一种自适应神经形态感知系统. (a)在物体抓取任务中面对不同特征的物体的自适应抓取过程, Smax代表最大允许接触刺激强度, Fmax表示抓取的最大输出力; (b)自动驾驶过程中对代表性场景的识别情况. 包括行人检测、道路标志检测、超车检测、前车检测、阴影检测、尾灯检测、反射物体检测、警示灯检测、特殊标记识别、夜间强光检测[23]
Figure 5. An adaptive neuromorphic perception system: (a) the adaptive grasping process when facing objects with different characteristics in a grasping task. Smax represents the maximum allowable intensity of contact stimulation, and Fmax represents the maximum output force for grasping; (b) the recognition of representative scenarios during autonomous driving, including pedestrian detection, road sign detection, overtaking detection, leading vehicle detection, shadow detection, taillight detection, reflective object detection, warning light detection, special marker recognition, and nighttime glare detection[23]
![]()
图 6 热力学亚稳态RENiO3. (a)在三种不同温度下, RENiO3的生成吉布斯自由能与稀土半径的关系; (b) DyNiO3在不同合成条件下的ΔG随温度的变化关系[28]
Figure 6. Thermodynamic metastability of RENiO3: (a) the relationship between the Gibbs free energy of RENiO3 and the radius of rare earth elements at three different temperatures; (b) the relationship between ΔG and temperature for DyNiO3 under different synthesis conditions[28]
![]()
图 7 金属有机分解方法制备RENiO3. (a)金属有机分解方法示意图, 稀土和镍金属的异辛酸有机前驱体混合后旋涂在LaAlO3(001)衬底上, 高氧压退火后靠近衬底表面的前驱体被分解共格生长形成准单晶层, 而位于衬底表面较远的前驱体则进一步生长为多晶RENiO3; (b)通过高氧压力辅助金属有机分解方法生长的RENiO3/LaAlO3(001)的电阻率(ρ)随温度的变化[33]
Figure 7. Preparation of RENiO3 using the metal-organic decomposition method: (a) schematic of the metal-organic decomposition method, where the organic precursors of rare earth and nickel metals are mixed and spin-coated onto a LaAlO3(001) substrate. After high-oxygen-pressure annealing, the precursors near the substrate surface decompose and grow coherently to form a quasi-single-crystal layer, while the precursors farther from the substrate surface further grow into polycrystalline RENiO3; (b) the temperature-dependent resistivity (ρ) of RENiO3/LaAlO3(001) grown using the high-oxygen-pressure-assisted metal-organic decomposition method[33]
![]()
图 8 熔盐法制备RENiO3. (a) KCl(001)表面俯视图; (b) SmNiO3(010)表面的俯视图; (c) SmNiO3(010)/KCl(001)界面的侧视图; (d) KCl熔盐辅助的异质成核过程及RENiO3合成方法示意图[38]
Figure 8. Preparation of RENiO3 using the molten salt method: (a) top view of the KCl(001) surface; (b) top view of the SmNiO3(010) surface; (c) side view of the SmNiO3(010)/KCl(001) interface; (d) schematic of the RENiO3 synthesis method based on KCl molten salt-assisted heterogeneous nucleation process[38]
-
[1] Weinstein B G. A computer vision for animal ecology. J Anim Ecol, 2018, 87(3): 533 doi: 10.1111/1365-2656.12780
[2] Voulodimos A, Doulamis N, Doulamis A, et al. Deep learning for computer vision: A brief review. Comput Intell Neurosci, 2018, 2018(1): 7068349
[3] Chen C Y, Seff A, Kornhauser A, et al. DeepDriving: Learning affordance for direct perception in autonomous driving // 2015 IEEE International Conference on Computer Vision (ICCV). Santiago, 2015: 2722
[4] Arents J, Greitans M. Smart industrial robot control trends, challenges and opportunities within manufacturing. Applied Sci, 2022, 12(2): 937 doi: 10.3390/app12020937
[5] Levinson J, Askeland J, Becker J, et al. Towards fully autonomous driving: Systems and algorithms // 2011 IEEE Intelligent Vehicles Symposium (IV). Baden-Baden, 2011: 163
[6] 杨春, 张睿尧, 黄泷, 等. 深度神经网络模型量化方法综述. 工程科学学报, 2023, 45(10):1613 Yang C, Zhang R Y, Huang L, et al. A survey of quantization methods for deep neural networks. Chin J Eng, 2023, 45(10): 1613
[7] 黄海丰, 刘培森, 李擎, 等. 协作机器人智能控制与人机交互研究综述. 工程科学学报, 2022, 44(4):780 doi: 10.3321/j.issn.1001-053X.2022.4.bjkjdxxb202204028 Huang H F, Liu P S, Li Q, et al. Review: Intelligent control and human-robot interaction for collaborative robots. Chin J Eng, 2022, 44(4): 780 doi: 10.3321/j.issn.1001-053X.2022.4.bjkjdxxb202204028
[8] Wang L Y, Zhang X X, Li Q, et al. Incorporating neuro-inspired adaptability for continual learning in artificial intelligence. Nat Mach Intell, 2023, 5(12): 1356 doi: 10.1038/s42256-023-00747-w
[9] Wang W, Danial L, Li Y, et al. A memristive deep belief neural network based on silicon synapses. Nat Electron, 2022, 5(12): 870 doi: 10.1038/s41928-022-00878-9
[10] Taye M M. Theoretical understanding of convolutional neural network: Concepts, architectures, applications, future directions. Computation, 2023, 11(3): 52 doi: 10.3390/computation11030052
[11] Rathi N, Chakraborty I, Kosta A, et al. Exploring neuromorphic computing based on spiking neural networks: Algorithms to hardware. ACM Comput Surv, 2023, 55(12): 1
[12] 王若男, 董琦. 基于学习机制的多智能体强化学习综述. 工程科学学报, 2024, 46(7):1251 Wang R N, Dong Q. Multiagent game decision-making method based on the learning mechanism. Chin J Eng, 2024, 46(7): 1251
[13] Basu A, Acharya J, Karnik T, et al. Low-power, adaptive neuromorphic systems: Recent progress and future directions. IEEE J Emerging Sel Top Circuits Syst, 2018, 8(1): 6 doi: 10.1109/JETCAS.2018.2816339
[14] Indiveri G, Sandamirskaya Y. The importance of space and time for signal processing in neuromorphic agents: The challenge of developing low-power, autonomous agents that interact with the environment. IEEE Signal Process Mag, 2019, 36(6): 16 doi: 10.1109/MSP.2019.2928376
[15] van Doremaele E R W, Gkoupidenis P, van de Burgt Y. Towards organic neuromorphic devices for adaptive sensing and novel computing paradigms in bioelectronics. J Mater Chem C, 2019, 7(41): 12754 doi: 10.1039/C9TC03247A
[16] Zhang F Q, Li C Y, Li Z Y, et al. Recent progress in three-terminal artificial synapses based on 2D materials: From mechanisms to applications. Microsyst Nanoeng, 2023, 9: 16 doi: 10.1038/s41378-023-00487-2
[17] Marković D, Mizrahi A, Querlioz D, et al. Physics for neuromorphic computing. Nat Rev Phys, 2020, 2(9): 499 doi: 10.1038/s42254-020-0208-2
[18] Wang Z R, Joshi S, Savel’ev S E, et al. Memristors with diffusive dynamics as synaptic emulators for neuromorphic computing. Nat Mater, 2017, 16(1): 101 doi: 10.1038/nmat4756
[19] Zhang H T, Park T J, Islam A N M N, et al. Reconfigurable perovskite nickelate electronics for artificial intelligence. Science, 2022, 375(6580): 533 doi: 10.1126/science.abj7943
[20] Azghadi M R, Iannella N, Al-Sarawi S F, et al. Spike-based synaptic plasticity in silicon: Design, implementation, application, and challenges. Proc IEEE, 2014, 102(5): 717 doi: 10.1109/JPROC.2014.2314454
[21] Panda P, Allred J M, Ramanathan S, et al. ASP: Learning to forget with adaptive synaptic plasticity in spiking neural networks. IEEE J Emerging Sel Top Circuits Syst, 2018, 8(1): 51 doi: 10.1109/JETCAS.2017.2769684
[22] Huang J N, Wang T, Huang H M, et al. Adaptive SRM neuron based on NbOx memristive device for neuromorphic computing. Chip, 2022, 1(2): 100015 doi: 10.1016/j.chip.2022.100015
[23] Wang S B, Gao S, Tang C Y, et al. Memristor-based adaptive neuromorphic perception in unstructured environments. Nat Commun, 2024, 15(1): 4671 doi: 10.1038/s41467-024-48908-8
[24] Zhang L B, Ye L, Zhao W W, et al. The evaluation of interface quality in HfO2 films probed by time-dependent second-harmonic generation. Materials, 2024, 17(14): 3471 doi: 10.3390/ma17143471
[25] Shaban A, Bezugam S S, Suri M N. An adaptive threshold neuron for recurrent spiking neural networks with nanodevice hardware implementation. Nat Commun, 2021, 12(1): 4234 doi: 10.1038/s41467-021-24427-8
[26] Zhang T, Hu M J, Ahmed Mia M Z, et al. Self-sensitizable neuromorphic device based on adaptive hydrogen gradient. Matter, 2024, 7(5): 1799 doi: 10.1016/j.matt.2024.03.002
[27] John R A, Liu F C, Chien N A, et al. Synergistic gating of electro-iono-photoactive 2D chalcogenide neuristors: Coexistence of hebbian and homeostatic synaptic metaplasticity. Adv Mater, 2018, 30(25): 1800220 doi: 10.1002/adma.201800220
[28] Cui Y C, Gao J X, Dong H L, et al. In situ high-pressure correlated transportation of heavy rare-earth perovskite nickelates as batch synthesized within eutectic molten salts at MPa-pO2. J Phys Chem Lett, 2024, 15(30): 7716 doi: 10.1021/acs.jpclett.4c01496
[29] Chen J K, Mao W, Ge B H, et al. Revealing the role of lattice distortions in the hydrogen-induced metal-insulator transition of SmNiO3. Nat Commun, 2019, 10(1): 694 doi: 10.1038/s41467-019-08613-3
[30] Jaramillo R, Schoofs F, Ha S D, et al. High pressure synthesis of SmNiO3 thin films and implications for thermodynamics of the nickelates. J Mater Chem C, 2013, 1(13): 2455 doi: 10.1039/c3tc00844d
[31] Zuo F, Panda P, Kotiuga M, et al. Habituation based synaptic plasticity and organismic learning in a quantum perovskite. Nat Commun, 2017, 8(1): 240 doi: 10.1038/s41467-017-00248-6
[32] Chen J K, Hu H Y, Wang J O, et al. Overcoming synthetic metastabilities and revealing metal-to-insulator transition & thermistor bi-functionalities for d-band correlation perovskite nickelates. Mater Horiz, 2019, 6(4): 788 doi: 10.1039/C9MH00008A
[33] Li H Y, Wang Y Z, Meng F Q, et al. Metal-organic decomposition growth of thin film metastable perovskite nickelates with kinetically improved quantum transitions. Int J Miner Metall Mater, 2023, 30(12): 2441 doi: 10.1007/s12613-023-2703-9
[34] Demazeau G, Marbeuf A, Pouchard M, et al. Sur une série de composés oxygènes du nickel trivalent derivés de la perovskite. J Solid State Chem, 1971, 3(4): 582 doi: 10.1016/0022-4596(71)90105-8
[35] Alonso J A, Martínez-Lope M J, Casais M T, et al. High-pressure preparation, crystal structure, magnetic properties, and phase transitions in GdNiO3 and DyNiO3 perovskites. Chem Mater, 1999, 11(9): 2463 doi: 10.1021/cm991033k
[36] Vassiliou J K, Hornbostel M, Ziebarth R, et al. Synthesis and properties of NdNiO3 prepared by low-temperature methods. J Solid State Chem, 1989, 81(2): 208 doi: 10.1016/0022-4596(89)90008-X
[37] Pérez-Cacho J, Blasco J, García J, et al. Study of the phase transitions in. J Phys: Condens Matter, 1999, 11(2): 405 doi: 10.1088/0953-8984/11/2/007
[38] Chen J K, Li Z A, Dong H L, et al. Pressure induced unstable electronic states upon correlated nickelates metastable perovskites as batch synthesized via heterogeneous nucleation. Adv Funct Mater, 2020, 30(23): 2000987 doi: 10.1002/adfm.202000987
[39] Li Z A, Yan F B, Li X Y, et al. Molten-salt synthesis of rare-earth nickelate electronic transition semiconductors at medium high metastability. Scr Mater, 2022, 207: 114271 doi: 10.1016/j.scriptamat.2021.114271
[40] Deng S B, Yu H M, Park T J, et al. Selective area doping for Mott neuromorphic electronics. Sci Adv, 2023, 9(11): eade4838 doi: 10.1126/sciadv.ade4838
[41] Kumar M, Lim S, Kim J, et al. Picoampere dark current and electro-opto-coupled sub-to-super-linear response from Mott-transition enabled infrared photodetector for near-sensor vision processing. Adv Mater, 2023, 35(18): 2210907 doi: 10.1002/adma.202210907
[42] Zhang Z, Mondal S, Mandal S, et al. Neuromorphic learning with Mott insulator NiO. PNSA, 2021, 118(39): e2017239118 doi: 10.1073/pnas.2017239118
[43] Kumar S, Wang Z W, Davila N, et al. Physical origins of current and temperature controlled negative differential resistances in NbO2. Nat Commun, 2017, 8(1): 658 doi: 10.1038/s41467-017-00773-4
[44] Bo Y H, Zhang P, Luo Z Q, et al. NbO2 memristive neurons for burst-based perceptron. Adv Intell Syst, 2020, 2(8): 2000066 doi: 10.1002/aisy.202000066
 下载:
下载:
计量
- 文章访问数: 8
- HTML全文浏览量: 4
- PDF下载量: 1
