
Key technology research and development and prospects for outdoor large- and medium-sized snow groomers
-
摘要:
2022年北京冬奥会是我国在重要历史节点举办的重大标志性活动,是展现国家形象、振奋民族精神的重要契机. 室外大中型压雪车是冰雪赛事的主要运营装备,其综合性能和制造技术水平不仅是保障赛事顺利进行的必要基础,同时也是我国制造能力、科技实力和国际竞争力等综合国力的直接体现. 本文梳理了国内外压雪车的研究现状,从“需求分析—关键技术攻关—装备研制—应用示范—体系构建”五个层次,开展推进系统、作业系统、整机优化与制造、测试评价四个方面的内容研究,构建室外大中型压雪车雪道路面高效静液驱动控制、轻量化履带可靠性设计、低温环境下橡胶悬挂设计、压雪车雪辊可靠性设计、多变环境下压雪车作业精准控制、压雪车车架及部件结构轻量化设计、室外大中型压雪车试验验证技术及指标体系七项关键技术,国产SG400室外大中型压雪车装备高效、精准、环保、可靠,在2022年北京冬奥会与冬残奥会、2024年第十四届全国冬季运动会滑雪场得到了应用与推广,完全满足国际冰雪赛事对雪道的要求. 最后,展望了压雪车未来的发展趋势,以期推动我国大中型压雪车迈向智能、绿色、环保、高效发展的新阶段.
Abstract:The 2022 Beijing Winter Olympics served as a pivotal moment for China, offering a chance to showcase its global image and uplift national pride. A key element of this event was the use of large- and medium-sized snow groomers, which played a crucial role in maintaining optimal conditions for ice and snow sports. These machines not only facilitated the seamless execution of the games but also reflected China’s strength in manufacturing and technology. To meet the growing need for advanced outdoor large- and medium-sized snow groomers, we conducted a thorough review of existing technologies and standards, both locally and abroad. We analyzed challenges such as adapting to different environments, reducing track weight, and ensuring quality control of the body surface. The project systematically addresses the technical challenges in snow groomer propulsion, operating system, overall optimization, manufacturing, testing evaluation, and application. Our goal is to advance the research and development of key components and vehicle technologies to create snow groomers that are highly efficient, reliable, lightweight, and precise. We aim to achieve mass production and establish an effective standard system, reducing China’s reliance of large- and medium-sized snow groomers on foreign imports. Currently, China’s snow groomer industry is still in the starting phase, with a significant gap in design and manufacturing capabilities. Therefore, overcoming the hurdles related to the research and development of key components and vehicle technologies for snow groomers and achieving mass production is an urgent priority. We have conducted research across five levels: demand analysis, key technology research, equipment development, application demonstration, and system construction. This involved focusing on four aspects: promotion system, operation system, whole machine optimization and manufacturing, and testing evaluation. We have explored seven key technologies: high-efficiency static hydraulic drive control for snow road surfaces, lightweight track reliability design, rubber suspension for low-temperature environments, reliability in snow roller vehicles, precise control of snow roller operations in variable environments, lightweight design of snow roller frames and components, and construction of experimental verification technology and indicator system for outdoor large- and medium-sized snow groomers. We have developed the SG400 outdoor large- and medium-sized snow groomer, a model that is efficient, precise, environmentally friendly, and reliable. This snow groomer meets the requirements of international ice and snow events for the track, with performance verified through demonstrations at different ski resorts, such as the 2022 Beijing Winter Olympics, Winter Paralympic Games, and the 14th National Winter Games in 2024. Our efforts resulted in a snow groomer that demonstrates not only high efficiency and reliability but is also lightweight and precise in operation. An effective standard system is now in place, marking a significant shift in China’s snow groomer industry from relying on foreign imports to becoming self-sufficient. This achievement is of great practical significance. Looking ahead, the focus is on advancing snow groomer technology in China by promoting intelligent, green, environmentally friendly, and efficient development.
-
Keywords:
- Beijing Winter Olympics /
- snow groomer /
- ice and snow sports /
- test evaluation /
- technical standard
-
自我国成功申办2022年北京冬奥会以来,国家相继出台了《“带动三亿人参与冰雪运动”实施纲要(2018—2022年)》和《关于以2022年北京冬奥会为契机大力发展冰雪运动的意见》,明确了在冬奥会期间,高质量推动冰雪运动发展,做好群众性冰雪运动的推广普及[1−2]. 我国滑雪场正在向大型化、专业化方向发展. 2019年,我国大中型滑雪场数量达到568家,占世界滑雪场数量的三分之一左右. 压雪车作为大型滑雪场滑雪赛道修整、维护的重要装备,每个滑雪场至少需配备3~5台,而2019年我国压雪车的保有量约为541台,存在巨大的市场空间.
国际冰雪赛事要求雪道平整、积雪深厚、雪质松软,对压雪车作业精度、行驶作业功率及可靠性提出了较高的要求[3]. 为满足冬奥会、冬残奥会的要求,亟需针对环境温度低、滑雪道高程落差大、行驶工况复杂等条件下,开展室外大中型压雪车动力系统、作业装置、整车优化、关键部件可靠性等方面关键技术攻关,突破高效稳定驱动、作业精准控制、轻量化、可靠性设计等技术瓶颈,研制室外大中型压雪车关键部件与整机,提升冰雪装备制造能力,研制国际一流产品,为冬奥会、冬残奥会和我国冰雪运动的发展提供技术支撑[4−5].
为全面贯彻党的十九大提出的“筹办好北京冬奥会、冬残奥会”要求,落实《北京2022年冬奥会和冬残奥会筹办工作总体计划和任务分工方案》,加快推进“科技冬奥(2022)行动计划”,科技部会同北京冬奥组委、北京市科委、河北省科技厅以及体育总局等部门,将“压雪车研发及应用示范”列入2020年国家重点研发计划“科技冬奥”重点专项.
本文围绕室外大中型压雪车研发的关键技术难题,梳理了国内外压雪车的研究现状,从“需求分析—关键技术攻关—装备研制—应用示范—体系构建”五个层次,开展推进系统、作业系统、整机优化与制造、测试评价四个方面的内容研究,阐述七项关键技术难题,国产SG400室外大中型压雪车装备在2022年北京冬奥会、冬残奥会的不同滑雪场完成性能验证,完全满足国际冰雪赛事对赛道的要求,成功入选2024年我国第十四届全国冬季运动会备战装备,顺利完成“十四冬”各项赛事服务. 最后,展望了压雪车未来的发展趋势,以期推动我国大中型压雪车迈向智能、绿色、环保、高效发展的新阶段.
1. 室外压雪车研究概况
1.1 国内外压雪车研究概况
压雪车作为滑雪装备制造业中的重型设备之一,是保障大型滑雪场正常运营的重要组成部分,其性能的好坏直接影响到滑雪场的安全性和经济性. 19世纪初,出于平整积雪的需要,世界第一台概念型压雪车应运而生. 随着欧美国家滑雪产业的日益兴起,19世纪60年代第一台压雪车原型车出现并投入滑雪场用于平雪、铺雪、推雪来整合雪道. 随着时代的发展和技术的进步,国际滑雪场的设施和机械设备市场已经具备了很好的产品研发、设备生产等各个环节,形成了完整的产业链结构,产业区域的聚集度也很高. 欧洲是压雪车的主要生产地区之一,两大压雪车品牌——德国凯斯鲍尔、意大利普瑞诺特压雪车的技术和质量在全球范围内享有较高的声誉,被广泛应用于世界各地的滑雪场地和赛事. 作为压雪车制造的龙头企业,德国凯斯鲍尔和意大利普瑞诺特在全球的压雪车已经呈垄断态势,几乎覆盖了全球90%的滑雪场,其中凯斯鲍尔占据全球压雪车市场近60%的份额,普瑞诺特市场份额接近30%.
德国凯斯鲍尔公司自1969年以来,累计生产了2.2万台压雪车. 该公司生产的PistenBully压雪车是全球压雪车第一品牌,该品牌压雪车性能非常稳定,极少出现大型故障问题,可在恶劣环境中持续运行. 从日本的北海道到欧洲的阿尔卑斯再到加拿大威斯勒滑雪场,在这些动则拥有几十条乃至上百条雪道的大雪场,总能见到凯斯鲍尔压雪车的身影,在各种地形上都可以发挥出超强的性能. 图1(a)为凯斯鲍尔生产的PistenBully 400压雪车,该压雪车已在全球范围内广泛应用. 凯斯鲍尔公司的压雪车不仅可以用于滑雪场地的修整,还可以用于其他雪地运动场地的建设和维护. 该公司推出的PistenBully 600拥有出色的推雪效果和高可靠性,符合欧V排放标准,宽大的全向雪铲和记忆功能为各种雪况提供了最佳的解决方案. 同时,其卷雪冠和车体平衡的设计创造出更好的卷雪效果.
![]() 图 1 国内外主要压雪车. (a)凯斯鲍尔公司PistenBully,(b)普诺瑞特,(c) ALPINE510,(d)悍牛200,(e)雪兔3X,(f)河北宣工SG400Figure 1. Snow groomer in China and foreign countries: (a) PistenBully snow groomer; (b) snow groomer Leitwolf X; (c) snow groomer ALPINE510; (d) snow groomer HN200; (e) snow groomer snow Rabbit 3X; (f) snow groomer SG400
图 1 国内外主要压雪车. (a)凯斯鲍尔公司PistenBully,(b)普诺瑞特,(c) ALPINE510,(d)悍牛200,(e)雪兔3X,(f)河北宣工SG400Figure 1. Snow groomer in China and foreign countries: (a) PistenBully snow groomer; (b) snow groomer Leitwolf X; (c) snow groomer ALPINE510; (d) snow groomer HN200; (e) snow groomer snow Rabbit 3X; (f) snow groomer SG400普瑞诺特公司属于意大利莱特纳集团,其生产的压雪车一直都是优质压雪车的代名词,以其卓越的性能、超高的能效、较低的运营成本以及前卫的设计而遍及全球. 该公司拥有最全的压雪机型号和履带式多功能车辆,在中国也有较高的进口量. 普诺瑞特公司在压雪车的技术研发方面一直保持着较高的水平,推出了一系列具有先进技术的压雪车产品,包括Leitwolf系列(图1(b))、Husky系列和Beast系列等.
法国都彭公司也生产出了多款高性能压雪车,公司生产的ALPINE 510压雪车(图1(c))配备铰链式前铲和压雪后犁,压出的雪面平整,但该公司的压雪车尚未进入国内市场.
中国压雪车市场基本上是被德国和意大利的两大品牌垄断,凯斯鲍尔压雪车集团上世纪九十年代进入中国市场,向中国极地研究院提供了第一台压雪车. 近年来,伴随2022年北京冬奥会以及大众滑雪旅游的双轮驱动,我国滑雪场数量呈现快速增长的趋势. 2018年,国内雪场全部压雪车数量约为541台,其中德国凯斯鲍尔压雪车约占40%,意大利普瑞诺特压雪车约占55%,国产数量约占5%. 与国外成熟先进的滑雪装备制造业相比,我国压雪车制造水平远远落后于市场的现实发展需要,压雪车本土化研发还处于起步阶段,滑雪市场产业链尚未真正形成,滑雪大型机械设备产业作为产业链的上游环节,高额利润被国外大品牌厂商占据.
广西玉林悍牛工程机器有限公司对压雪车的研制较早,该公司第一台压雪车于2015年落地,目前已研发出悍牛压雪车第三代产品. 悍牛压雪车分为多种型号,适用于各大、中、小型滑雪场及室内滑雪场. 图1(d)为悍牛生产的HN200压雪车,该压雪车是中型滑雪场的压雪先锋,是销量最大的中国中型压雪车,已覆盖黑龙江、北京、天津、河南、山东、山西、浙江、湖南等11个省份,在50多家滑雪场进行使用. 该压雪车能够适应长时间工作需求,雪铲可以满足多个角度的动作工况,雪犁可完成打雪、压雪等功能. 黑龙江奥格斯特旅游设备有限公司研发了适合中小型冰雪项目的压雪车,如图1(e)所示. 图1(f)为河北宣工机械发展有限责任公司生产的压雪车,该压雪车采用先进的液压技术和高效的打雪设计,能够快速有效地清除道路上的雪,快速、精确地控制打雪深度和速度,适用于各种路面和场地.
在压雪车相关技术标准方面,国外两大主要品牌的企业标准被视为国际标准. 然而,国内滑雪场与国外滑雪场雪况不同,对压雪车的一些性能要求也不一样,同时国内缺少压雪车的国家标准和行业标准. 因此,加快推动建立健全我国滑雪装备技术标准体系,是压雪车技术与装备研制的重要任务之一,也是确保冰雪运动产业良性发展的前提.
1.2 压雪车相关技术研究概况
在压雪车环境感知方面,德国凯斯鲍尔已经研发出基于激光雷达的雪道环境感知系统[6]. 国内关于滑雪场雪道感知与重构的研究较少,目前已有研究手段多依赖于无人机机载激光雷达. 白莎莎等[7]提出了一种基于无人机机载激光雷达点云的雪道坡度自动提取算法,使用投影高程差滤波、聚类分割等算法对雪场点云进行预处理,获取雪道边缘特征数据,消除了实际应用中部分点云数据稀疏或缺失对中线拟合带来的不利影响. 考虑到滑雪场天气、日常运营等因素的影响,通过无人机机载激光雷达感知滑雪道环境的方案具有一定的局限性. Onesto等[8]研究了基于安装在机舱顶部二维固态激光雷达传感器的障碍物检测系统,通过扩展占用网格框架描述了滑雪道周围环境,设定了基于预期高度的周围环境,通过对压雪车实车测试验证了该系统的有效性,提升了压雪车在滑雪场行驶与作业的夜间环境感知能力. 焦倩等[9]提出了压雪车车载激光雷达点云时域波形阶跃值检测的雪道分割算法,并构建了适用于高山滑雪场的实时定位与建图算法SLAM.
在压雪车履带轻量化方面,为减小室外大、中型压雪车的质量,减小接地比压,且满足可靠性和可用度要求,崔玉莲等[10]从结构优化、轻量化材料选用和制造工艺等途径对室外大中型压雪车履带的轻量化设计进行分析,并基于虚拟样机技术对履带板的使用寿命进行预测,为提高履带整体性能提供技术支撑.
在压雪车车身表面质量检测方面,Zhang等[11]提出了一种增量双重神经网络检测模型以及基于原位图像的压雪车车身表面缺陷高精度检测方法,其中双重神经网络结构用于实现基于度量学习和批处理的模型增量训练,并对感兴趣的区域进行特征提取,以提高复杂缺陷的位置精度,实验结果显示,该表面缺陷检测方法平均值精度为51.8%,标记率为25%,处理速度为每秒22帧. Shi等[12]提出了一种在线收集激光喷涂粉末床的自适应分割方法,评估了其对缺陷分析的影响,并将该技术应用于压雪车车身激光粉末喷涂领域.
2. 室外大中型压雪车技术难题
国外压雪车的进口价格非常昂贵,日常维护保养不仅费用较高,还需要国外压雪车厂家的人员到国内操作,压雪车的生产制造压雪车技术壁垒很高,而国内滑雪设备厂商对压雪车的研发投入不足,导致我国压雪车市场长期被国外品牌垄断. 目前,国内还有相当一部分滑雪场没有购买压雪车,市场有较大空白[13].
此外,与国外成熟先进的压雪车产业链相比,国内的滑雪设备生产厂商不多,体量也较小,大多数都是主营代加工业务,或者是生产一些贴牌产品,没有掌握核心制造技术,尤其是在压雪车推进系统、作业系统、整体优化与制造、测试评价与应用方面的关键技术难题,已成为制约压雪车研发的“卡脖子”问题[14−15].
2.1 推进系统
在推进系统方面,对冻土路和深雪路面的地面力学特性缺乏系统性研究,履带式压雪车在冰雪路面的牵引特性不了解,压雪车作业工况驱动载荷与悬架载荷的分析计算较为缺乏. 因此,需要综合采用理论分析、仿真计算、优化设计、实验验证等手段,从压雪车–地面作用的基础理论出发,综合分析影响压雪车推进系统结构和性能的多个维度,通过开展冻土路和深雪路面的地面力学特征分析与实验测试、履带车辆行驶理论和特殊路面牵引特性、压雪车作业工况驱动载荷和悬架载荷的分析计算,采用材料改进和工艺优化相结合,局部验证与总体性能验证相支撑,综合研究高效驱动器、轻量化履带、低温高寿命悬架系统的优化设计问题.
2.2 作业系统
在作业系统方面,压雪车作业装置、液压传动及控制机构的优化设计有待提高,雪辊辊齿对打雪质量的影响尚不清楚. 因此,需要从滑雪赛道的路面特征、不同温度下的雪质硬度展开研究,对压雪车作业装置、液压传动及控制机构进行优化设计,通过自适应协调优化控制技术来提高作业质量. 以雪辊为研究对象,通过辊齿齿形及齿根的优化设计、在线健康预测技术进行预测性维护,提高关键部件可靠性及作业效率,解决压雪车作业装置目前存在的可靠性和作业质量问题.
2.3 整体优化与制造
在整体优化与制造方面,压雪车动力传动系统效率较低,主车架和核心部件结构重量较大,整车总体布局、散热系统及人机工程方面技术有待加强. 因此,需要在考虑不同动力组合的基础上,基于可无极调速的闭式液压回路方案进行压雪车动力传动高效匹配. 基于精密铸造技术和高分子材料的应用,实现主车架和核心部件的结构轻量化. 从总体布局、散热系统和人机工程等方面对整车进行集成优化. 结合压雪车多品种、小批量、高附加值的特点,研制可适应定制化需求的生产工艺,融合互联网+、智能产品、智能服务等先进理念,开发基于5G、先进定位的交互式智能管理系统.
2.4 测试评价
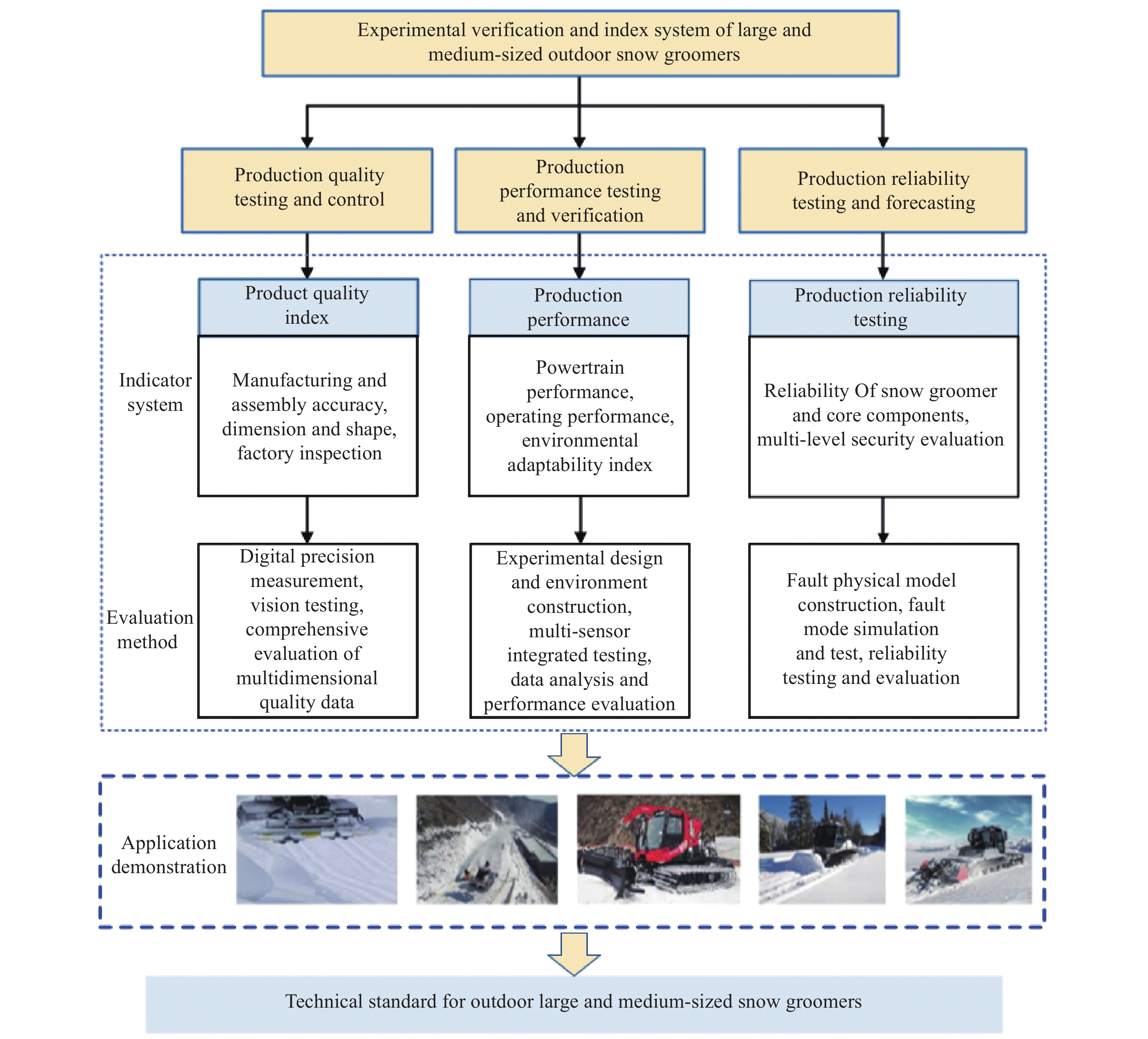
在测试评价与应用方面,压雪车产品质量、装备性能及可靠性方面的评价体系缺乏,满足冬奥会及其他国际赛事的滑雪场赛道要求不够明确. 因此,需要从压雪车产品质量、装备性能、可靠性三个方面构建评价指标体系,基于数字化测量和可靠性理论研究相应的测试与评价方法. 依据冬奥会及其他国际赛事对赛道的要求,调研、论证室外大中型压雪车的示范要求与示范场景,选择多个滑雪场进行性能验证、应用示范与推广.
综上所述,国产压雪车尚处于起步阶段,与国外相比,压雪车设计制造水平存在很大差距. 突破压雪车的关键零部件研发及整车关键技术并实现批量化生产是目前亟需解决的问题[16]. 研制高效率、高可靠性、轻量化、作业精准化压雪车装备,建立有效的标准体系,改变我国大中型压雪车完全依赖国外进口的现状,具有非常重要的现实意义.
3. 室外大中型压雪车攻关路线
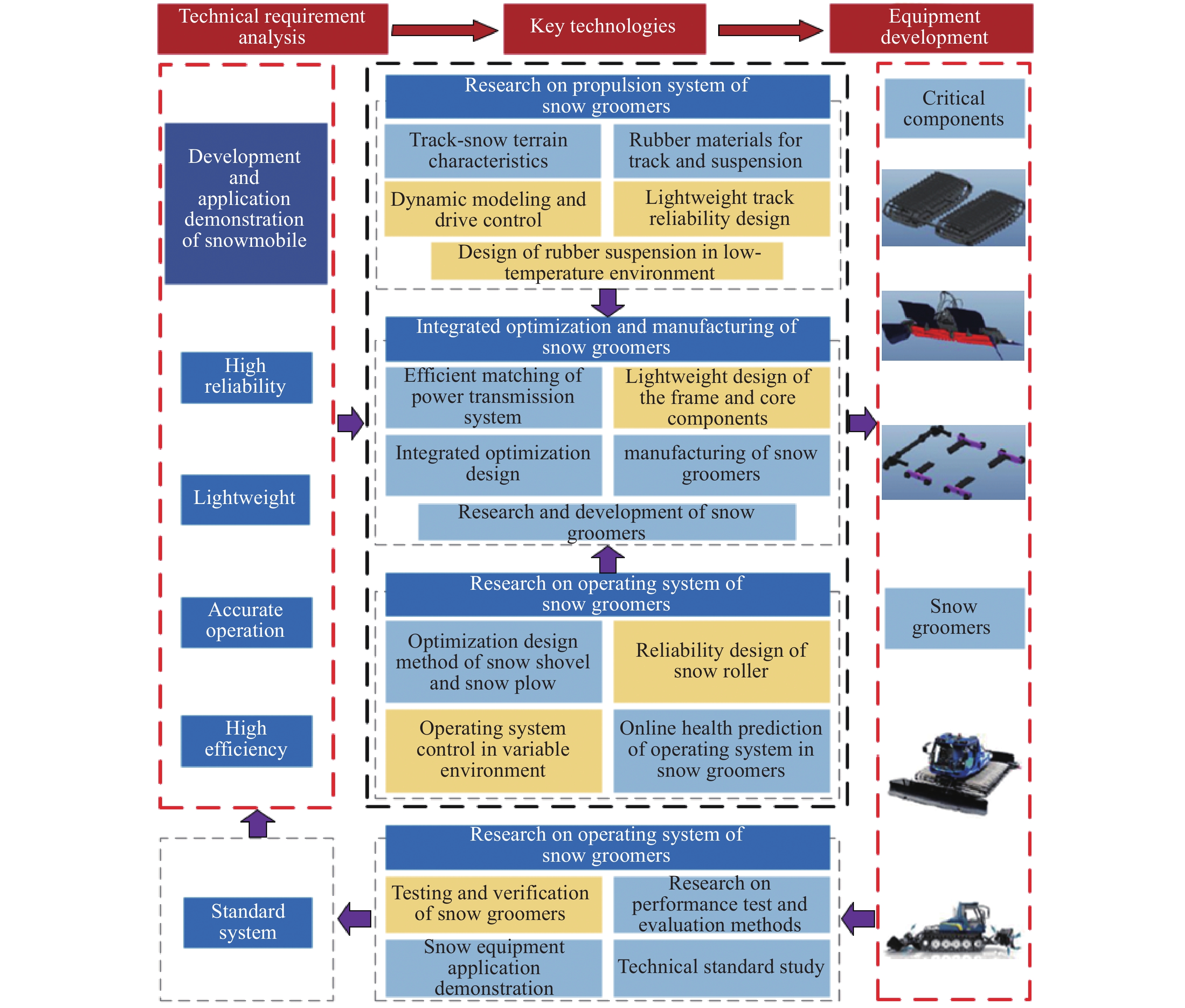
如图2所示,室外大中型压雪车攻关路线及研发应用从“需求分析—关键技术攻关—装备研制—应用示范—体系构建”五个层次展开. 针对环境温度低、高程落差大、行驶工况复杂等条件下,室外大中型压雪车在高效、精准、环保、可靠等方面的需求,围绕高效稳定驱动、作业精准控制、轻量化、可靠性设计等研究内容,从推进系统、作业系统、整机优化与制造、测试评价四个方面开展研究,攻克室外大中型压雪车雪道路面高效静液驱动控制、轻量化履带可靠性设计、低温环境下橡胶悬挂设计、压雪车雪辊可靠性设计、多变环境下压雪车作业精准控制、压雪车车架及部件结构轻量化设计、室外大中型压雪车试验验证技术及指标体系构建七项关键难题. 研制室外大中型压雪车装备,形成批量化生产能力,依据国际冰雪赛事对赛道的要求,在不同滑雪场开展性能验证与应用示范. 最终,形成一套达到国际水平的高端压雪车可靠性设计标准,为冬奥会、冬残奥会和我国冰雪运动的发展提供技术支撑.
![]() 图 2 室外大中型压雪车研发及应用示范总体技术路线Figure 2. Overall technical roadmap for research and application of outdoor large-and medium-sized snow groomers
图 2 室外大中型压雪车研发及应用示范总体技术路线Figure 2. Overall technical roadmap for research and application of outdoor large-and medium-sized snow groomers3.1 推进系统
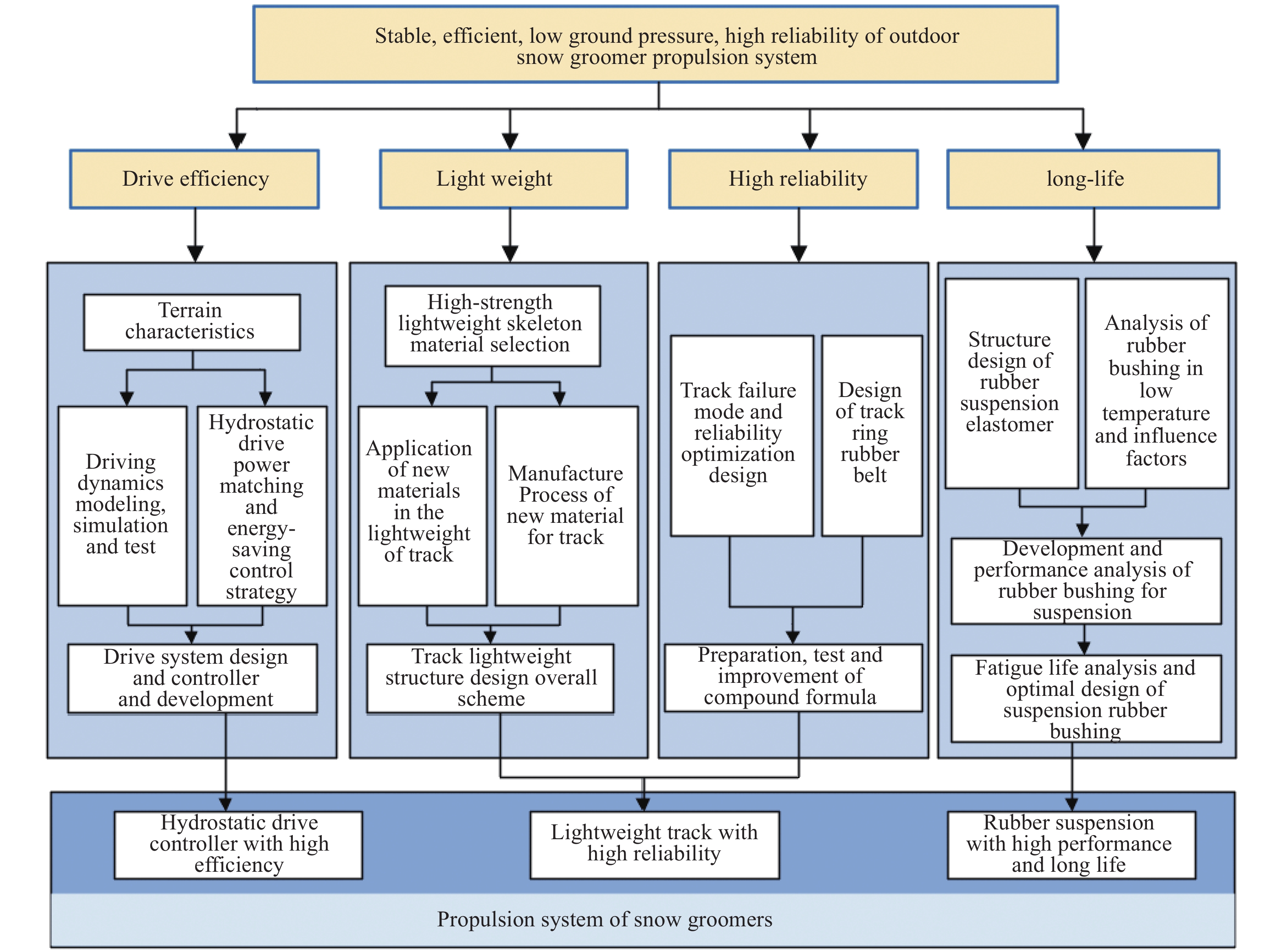
压雪车推进系统主要涉及压雪车雪道路面高效静液驱动控制、超低接地比压下高强度压雪车履带轻量化设计、低温环境下橡胶悬挂设计等关键技术,具体技术路线如图3所示.
(1)室外大中型压雪车雪道路面高效静液驱动控制.
大中型压雪车液压驱动系统具有工况变化剧烈、非线性强和反应滞后等特点,传统的控制方法难以满足多工况匹配控制的要求. 为实现多工况下压雪车动力性、经济性和操纵性匹配控制,需要分析驱动系统匹配不当造成能量损失的原因,进行负荷传感、恒功率、变功率和转速感应控制之间的协调匹配控制研究,针对典型等级雪道路面,提出实现驱动系统经济性和动力性协调匹配控制策略. 压雪车液压驱动系统方案及控制关系如图3所示. 采用左右两侧独立的泵–马达闭式驱动系统,动力传递至左右泵–马达系统,后经侧减速器及主动链轮驱动车辆行驶,通过改变泵、马达排量可调整输出转速,实现车辆变速或转向. 压雪车作为典型牵引型机械,其静液驱动系统全部承受工作装置的变化剧烈、波动大的非平稳随机负荷. 为了适应这种载荷特点,使压雪车各部分性能得以充分发挥,从而使整个系统达到合理匹配,采用由变量泵–变量马达组成的闭式变量液压系统,且为双泵–双马达组成的左右独立驱动回路,可对两边回路进行统一控制,既可联动实现车辆的前进、后退及相应的速度改变,又可分别动作,实现不同半径的转向或原地转向.
(2)超低接地比压下高强度压雪车履带轻量化设计.
履带是压雪车整机中的重中之重. 它不仅是压雪车的运动部分,同时也是整个压雪车的支撑部分,既承载整机的自重,运行时又承受工作装置的行驶阻力,将动力系统扭矩经驱动轮转化为履带的驱动力. 履带占整车比重较大,履带重量大会使压雪车接地比压增加,加速性能下降,增大燃料消耗,缩短悬挂装置的使用寿命等. 此外,压雪车不仅在低温有较大坡度的雪场上工作,而且在工作过程中还有在山石上行走的情况,这对履带质量提出了更高的要求.
针对室外大中型压雪车大功率、低接地比压和高可靠性等要求,构建冰雪路面履带行走动力学模型,突破履带材料—结构—工艺全过程轻量化技术,实现超低接地比压下高强度压雪车履带轻量化设计. 研究不同结构和不同材料履带板的力学性能,研制高强度高韧性的橡胶履带,形成耐低温的橡胶履带面胶、覆胶配方体系,提高拉断强度[17]. 创新零件成型技术和零件制造工艺,解决履带的轻量化问题,实现超低接地比压要求. 研究履带在不同使用条件下的失效形式、机理及应对策略,建立可靠性设计模型,提高履带的平均故障间隔时间,并通过可靠性实验,验证履带的性能和可靠性,实现轻量化履带高里程、高性能、耐低温、耐撕裂等多项性能要求,支撑我国大型压雪车整体技术达到国际同类产品先进水平.
(3)低温环境下橡胶悬挂设计.
悬挂系统是压雪车的重要组成部分,其功用是把车体和负重轮弹性地连接起来,传递作用在负重轮和车体间的力和力矩,缓和压雪车行驶、作业时经负重轮传到车体的冲击力,并减少车体的振动,保证压雪车能够实现平稳的行驶及作业. 压雪车经过不平雪地时,负重轮沿着不平的地面上下运动,若负重轮和车体是刚性连接,则负重轮承受的颠簸和冲击将直接传递给车体,导致难以平稳进行压雪作业,同时车体内安装的机件、仪器、仪表受到较大的振动负荷而更易损坏. 因此,在负重轮和压雪车体间安装弹性元件建立弹性连接是非常必要的. 由于弹性元件具有弹性,负重轮可以相对于压雪车体实现上下运动. 弹性元件的变形能够吸收负重轮传递的能量,从而缓和了车体的振动,但不能完全消耗车体所储存的能量,这部分能量会转化为车体的振动,进而影响压雪车的平稳作业,降低压雪质量. 现有履带式车辆悬挂装置的质量通常占到整车质量的3.7%~7.0%,而低温工作环境对压雪车悬挂系统的性能带来一定的挑战,复杂的悬挂系统对于维修保养带来较大的难度,因此设计结构简单、低温性能好,便于维修和保养的悬挂系统成为当前室外大中型压雪车亟需解决的问题.
针对低温、循环冲击载荷作用下橡胶弹簧弹性降低、塑性变形严重的问题,构建低温环境下橡胶弹性元件性能分析模型,突破复杂工况下压雪车悬挂系统橡胶衬套疲劳寿命分析与预测技术,设计高性能长寿命压雪车橡胶悬挂;通过实验分析压雪车悬挂系统橡胶衬套低温特性及影响因素,研究低温对橡胶弹性元件传递率和固有频率的影响;探索雪场复杂环境下压雪车悬挂装置载荷特性,基于有限元仿真与实际试验分析衬套刚度对悬挂系统传递特性的影响;分析压雪车悬挂系统橡胶衬套的疲劳失效特征,以等效最大主应变作为疲劳损伤参量建立橡胶材料的疲劳寿命预测模型,采用本构方程模拟橡胶材料的力学性能,对其在实际道路随机振动条件下的寿命进行预测和分析,实现橡胶悬挂的结构、性能优化和寿命提升.
3.2 作业系统
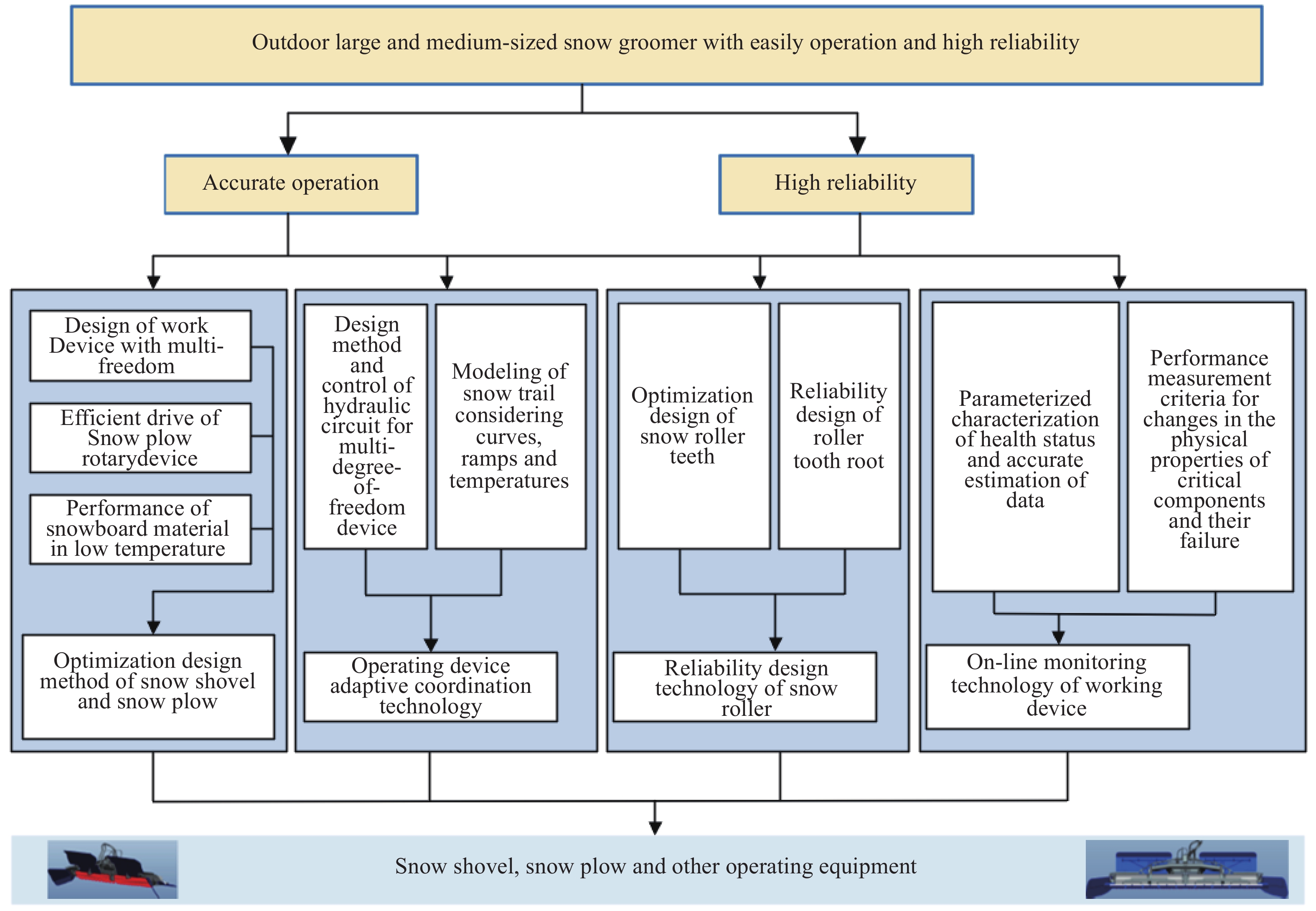
压雪车作业系统主要涉及雪辊可靠性设计以及多变环境下压雪车推雪、打雪、平雪作业精准控制等关键技术,具体技术路线如图4所示.
(1)压雪车雪辊可靠性设计.
雪辊辊齿的长度、厚度及齿形对打雪质量和雪辊的可靠性有很大的影响,如何在设计中实现打雪质量与可靠性最优是雪辊设计的关键问题. 人造雪与天然雪在密度等物理特性方面有很大的区别,研究人造雪的力学特性是雪辊可靠性设计和高质量作业的理论基础. 针对目前缺乏人造雪物理特性研究的问题,需要采用实地测试的方法,获得不同层级的积雪密度、积雪抗压强度、压力沉陷、积雪抗剪强度等物理特性,在此基础上构建基于离散元的冰雪负载模型,为雪地负载研究提供相对准确、直观的仿真环境.
针对雪辊齿根部应力大易断裂,影响作业系统可靠性的难题,构建流–固耦合动力学模型,揭示雪粒–辊齿耦合关系以及齿形变化对雪质的影响机理,实现雪辊齿形优化和可靠性设计. 针对滑雪赛道对松软雪质的要求,研究雪铲、雪犁横向/纵向/侧倾摆动机构设计方法,优化执行机构铰接点布置方案,基于机构弹性变形缓和纵向冲击,以提高雪铲、雪犁作业灵活性;分析雪辊齿形与打雪深度、阻力、雪粒运动速度及方向间的关系,建立雪粒–辊齿耦合动力学模型,实现齿形优化设计,提高打雪质量和雪辊使用寿命;建立辊齿的力学模型,分析冲击载荷作用下辊齿的应力,研究辊齿根部的可靠性设计方法,突破低温环境冲击载荷作用下的雪辊辊齿设计技术,提高辊齿的寿命,实现高质量打雪下的高可靠性辊齿设计,保证压雪车高效作业.
(2)多变环境下压雪车推雪、打雪、平雪作业精准控制.
压雪车作业装置包括雪铲和雪犁两个机构,均采用液压驱动. 压雪车主要作业方式是压雪车前方的雪铲铲雪,将堆积的雪铲平,保证雪道的平整. 雪铲的主要任务是推雪,一方面修整雪道,另一方面为压雪车预留接触面和支撑面. 为了设计适用于任何不平整坡道推雪作业的雪铲,提高压雪作业的赛道适应性,液压系统通过控制油缸动作满足设计推雪铲的12个动作:主铲体上升下降、前倾后倾、左右侧顷、水平正反向回转,左、右翼铲展开与回收. 压雪车后方雪犁内部的雪辊主要完成打雪功能,保证雪质蓬松再用压雪板将雪压成符合要求的“面条雪”. 由于雪场温度较低,雪颗粒之间的状态以及冰雪的密度会产生不同类型的雪,可将冰雪分为松散雪、密集板积雪、强密集雪、压雪、压实冻冰、冰膜以及纯冰七种,这就导致雪犁在打雪过程中,雪辊的负载是不断变化的,雪辊转速也会不断变化. 如果转速较低,会出现打雪不充分、雪质不松散;转速较高,辊齿与雪块间会产生较多的热量,融化一部分雪,雪水形成薄冰. 因此,为了保证雪犁的打雪质量,需要对雪辊马达的转速进行控制.
为了适应滑雪赛道地形多变的特点,压雪车的前后作业装置具有多个自由度,驾驶人员需要频繁操作压雪车控制机构来适应地形,劳动强度大、效率低,对驾驶员的要求较高,凯斯鲍尔与普瑞斯特设备的驾驶人员需要培训半年以上. 针对雪铲、雪犁的复杂地形作业要求,需要分析其空间姿态,研究实现雪铲、雪犁运动姿态的液压驱动及高速、高地面适应性的雪辊液压回路的设计方法,为作业装置的系统设计及精确控制提供支撑. 针对滑雪赛道路况复杂及雪质多变而导致精准作业困难的问题,建立不同温度、不同种类雪质的硬度、密度等参数的数据模型,分析雪铲推雪作业阻力与作业速度、牵引力之间的耦合作用,研究不同雪质与雪辊转速、转矩的对应关系,突破多变环境下作业装置的自适应协调控制技术,满足滑雪赛道的质量要求[18−19].
3.3 整机优化与制造
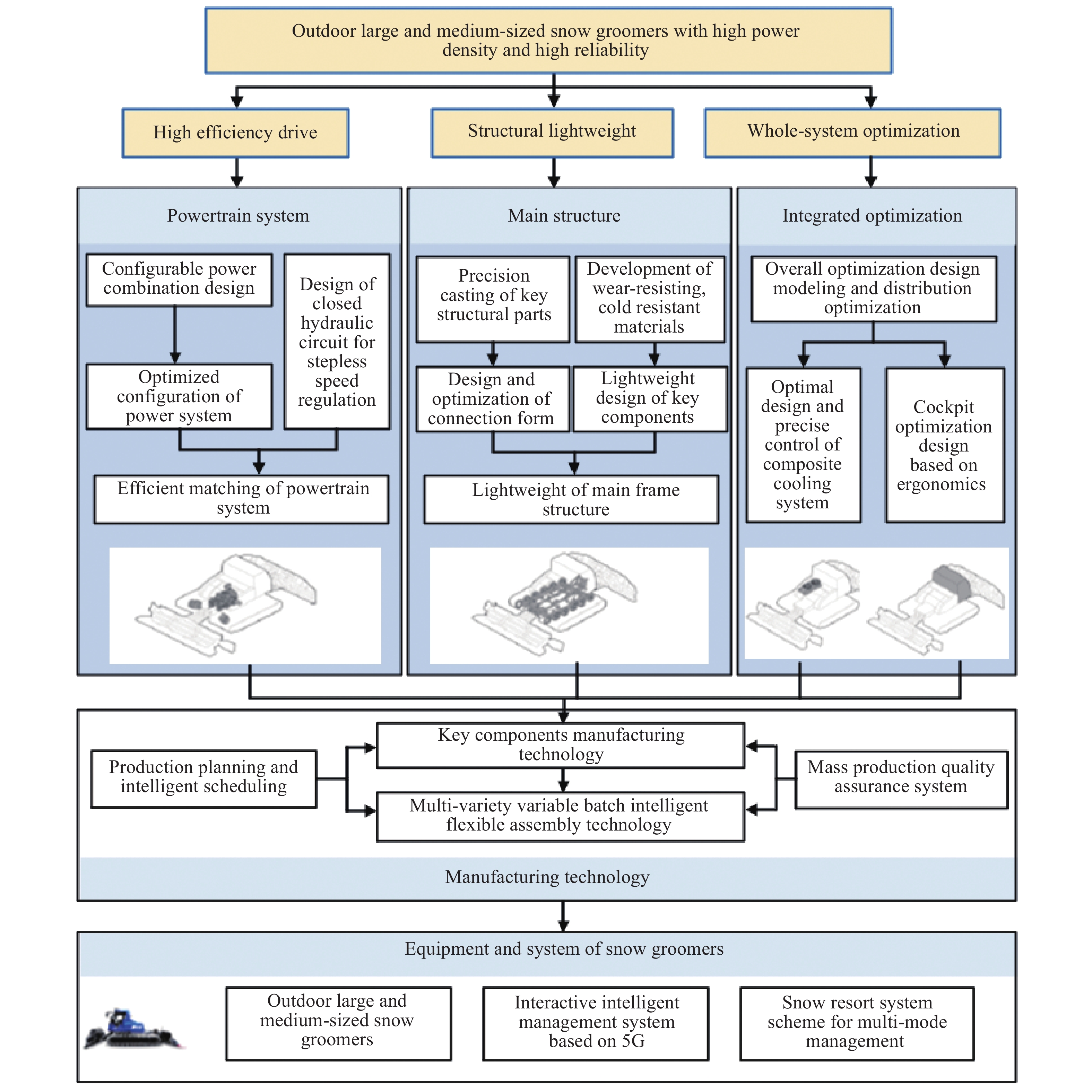
整机优化与制造涉及压雪车动力系统高效传动、车架及部件结构轻量化及整机优化设计等关键技术,具体技术路线如图5所示.
结构轻量化是减轻压雪车整体重量、降低接地比压的重要手段,需要研究主车架结构轻量化设计方法、突破耐磨/耐寒高分子材料应用技术,实现大中型压雪车的低接地比压设计,对其适应雪地松软作业环境至关重要. 针对压雪车的不同工况,分别对车架进行静力学和动力学分析. 在保证车架满足强度和使用寿命情况下,达到减轻压雪车重量、降低接地压比目的. 由压雪车作业方式可知,车架中连接前铲和连接雪犁的连接件是关键部位,需要对其进行轻量化分析设计. 根据每种工况下受到的载荷和力的方式,将多个工况的不同情况进行权重计算,并进行优化处理.
3.4 测试评价
室外大中型压雪车测试评价主要涉及产品质量检测与控制、产品性能测试与验证及产品可靠性测试与预测、压雪车试验验证及指标体系等关键技术,具体技术路线如图6所示.
冰雪装备产业在国内属于新兴产业,有效的规范和标准是该产业良性发展的基础. 针对当前缺乏压雪车国家标准、国际标准体系参考存在整机技术质量无法认定等问题,需要构建大中型压雪车试验验证技术体系与评价指标体系,确保压雪车装备性能满足冬奥会及相关国际赛事要求.
在压雪车整机质量检测方面,外观检查对于大中型压雪车产品制造过程中的质量控制至关重要. 基于图像处理和机器学习的视觉检测可以避免转运和重新安置等阶段,显著降低生产成本. 然而,由于生产现场的复杂背景、照度和不断变化的环境使工业相机成像和模型训练面临巨大挑战. 一方面,大中型压雪车体积大、表面复杂度高,工业相机与压雪车整车产品表面的距离大,相机视野中拍摄到的内容多,背景复杂. 另一方面,现有开源工业缺陷数据集不能完全满足研究的需要,需要额外补充相应的数据集,如斑点、开裂、掉漆、凹陷、划痕等常见的表面缺陷. 由于手动注释的成本很高,很难通过对象级注释获得数据集实际情况.
面向我国冰雪产业和滑雪装备发展需求,需要开展室外大中型压雪车驾驶舱人机工程分析,舒适的驾乘体验不但是驾驶员的需求,也是以人为本理念的体现. 需要从压雪车驾驶室设计、噪声分析、整车热管理、车队多模式管理等方面开展研究,具体如下.
在驾驶室设计方面,需要调研压雪车驾驶员的驾乘感受和操控需求,基于人机工程学开展试验研究,从驾驶舱总体布局、操控界面设计、辅助功能配置等方面优化驾驶舱设计方案,对提升压雪车操作性和适用性至关重要[20]. 室外大中型压雪车驾驶室的布置与汽车驾驶室设计类似,但我国专门针对压雪车驾驶室的人机工程研究较少. 压雪车人机工程学可借鉴以下几点:采用与环卫类乘用汽车相同的原理确定压雪车驾驶室各硬点位置;B类汽车操作设备的空间布置经验;B类汽车的人体尺寸和仿真分析动作.
在驾驶室噪声分析方面,需要分析噪声的来源,建立怠速模式和作业模式的不同震动频率下的声压幅值. 结合点位图和噪声分布,通过不同行驶状态下驾驶员耳边噪声实验,探究不同振动源噪声的贡献度.
在压雪车整车热管理方面,需要对压雪车动力系统开发精准控制的复合热管理及电、液控制系统.
在车队多模式管理方面,需要构建包含单机管理/联机作业/车队管理的多模式管理解决方案,突破基于5G的多传感器数据采集与智能融合分析技术,实现压雪车在线状态分析与健康维护. 在单机管理的基础上,基于多机数据互通与共享,实现联机作业管理,合理调配造雪机或压雪车进行推雪作业. 结合数据融合及相关向量机理论,研制单机、车队数据智能分析和统一调度系统,实现装备在线状态分析与健康维护,提高压雪车可用度.
在压雪车相关标准与规范方面,国外两大主要品牌的企业标准被视为国际标准. 然而,国内滑雪场与国外滑雪场的雪况不同,对压雪车的一些性能要求也不同,但国内目前还没有压雪车的国家标准和行业标准,需要构建室外大中型压雪车测试评价体系与应用规范,填补我国压雪车测试评价标准的空白. 围绕压雪车行驶能力、作业能力、可靠性、安全性等方面,构建了评价指标体系,在相关测试评价方法研究的基础上,结合示范应用,制定室外大中型压雪车评价应用规范及标准.
4. 室外大中型压雪车工程应用
河北宣工机械发展有限责任公司牵头的团队经过产学研用联合攻关研制开发具有自主知识产权的室外大中型压雪车7台,形成年产50台的批量化生产能力,所研发的SG400压雪车整机参数与国外同类产品对比如表1所示. 可以看出,与国外同类型压雪车相比,SG400压雪车已达到了国际先进水平. 2022年11月至2023年3月,SG400型室外大中型压雪车分别在万龙、太舞、多乐美地、八易、七山等高海拔、大坡度、高寒度大型滑雪场通过试验验证,对压雪车爬坡能力,地形适应能力,推雪、平雪、打雪作业能力进行了应用示范. 结果表明,SG400压雪车整机动力性、可靠性高,经济性好,能够适应以上5个滑雪场的所有气候和地理环境. 压雪车作业装置在推雪、平雪、打雪的作业中,能够将人造雪推散,用雪铲推开雪道坚硬的表壳,用雪犁将雪粉碎,用压雪板将雪梳成“面条雪”,并达到滑雪比赛对雪面厚度的要求. 压实的雪道能够给运动员提供相对稳定的摩擦与支撑,有利于运动员精准地操控滑雪板,维持平衡,控制转弯的形状、大小和滑行的速度,符合国际/国内专业滑雪赛事标准. SG400压雪车整机作业效率、可靠性高,操作灵活省力,作业范围宽,驾驶室密封及保温性能良好,视野开阔,司机工作环境比较舒适,整机性能达到国际高端压雪车水平. 这不仅改变了我国大中型压雪车完全依赖国外进口的现状,而且打造了国际一流的压雪作业装备设计制造企业.
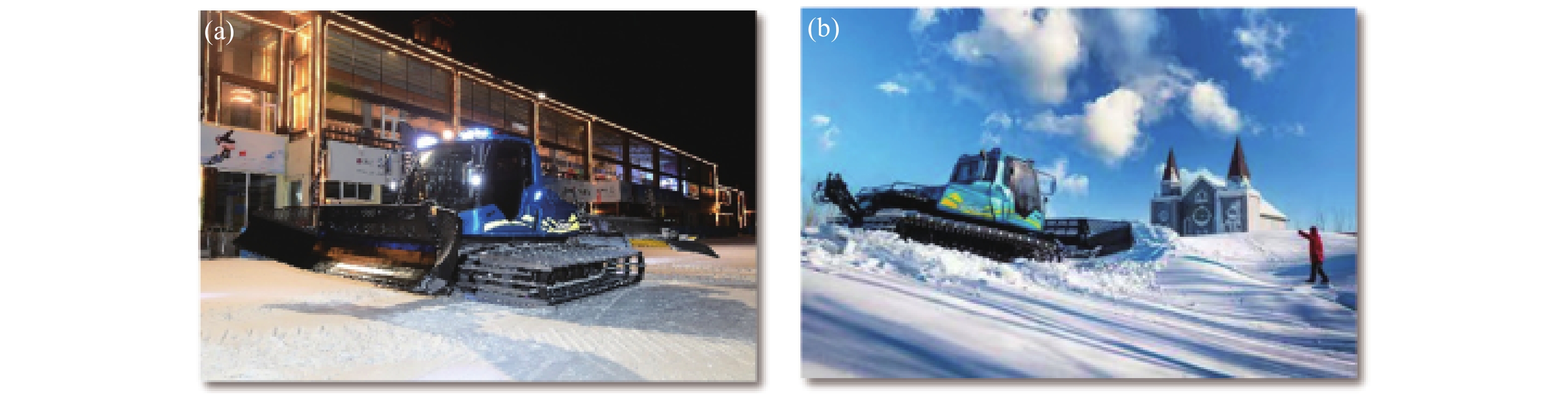
表 1 SG400压雪车整机参数与国外同类产品对比Table 1. Comparison of the parameters of the SG400 snow groomer developed in the project with similar foreign productsParameter SG400 PistenBully P400 Prinoth NEW BISON Vehicle length/mm 8240 9010 8510 Vehicle height/mm 2925 2830 3048 Width (including track) /mm 4238 4206 4216 Width (including snow plow) /mm 6406 6400 6200 Snow shovel deployment width/mm 5390 5260 5360 Vehicle speed/( km·h−1) 21 23 21 Climbing ability/% 100 100 100 Engine model Cummins QSL8.9 Cummins QSL9 Caterpillar C9.3 Rated speed/(r·min−1) 2100 2100 1700 Power/kW 264( 2100 r·min−1)272( 2100 r·min−1)298( 1700 r·min−1)Maximum torque/(N·m) 1500 (1500 r·min−1)1519 (1500 r·min−1)1726 (1400 r·min−1)2024年2月,“十四冬”各项赛事在内蒙古自治区正式拉开序幕. 比赛期间,SG400压雪车亮相内蒙古赤峰美林谷滑雪场,为赛事提供专属服务,如图7所示. 经其作业过的雪道均匀无缝,特别适合在极端松软雪况下运行,保证平整后的雪道松软不飞雪,压出的高质量“面条雪”完全符合赛级雪道标准. “十四冬”是继2022北京冬奥会后我国举办的规模最大、水平最高、影响力最大的冬季运动综合性赛事,SG400压雪车经过层层严苛的考核与测试,成功入选“十四冬”备战装备,服务保障比赛的各阶段.
![]() 图 7 室外大中型压雪车滑雪场作业. (a) 夜间作业; (b) 白天作业Figure 7. Outdoor large- and medium-sized snow groomers operating in snow fields: (a) operation in the night; (b) operation in the day
图 7 室外大中型压雪车滑雪场作业. (a) 夜间作业; (b) 白天作业Figure 7. Outdoor large- and medium-sized snow groomers operating in snow fields: (a) operation in the night; (b) operation in the day我国目前压雪车的需求处于上升期,但由于国外产品整机和配件价格高、售后服务配套不足,尤其是配件采购时间长,用户采购国内装备的意愿比较强烈. 国内万龙、七山等滑雪场均提出了购买替代进口压雪车的意向,张家口太舞滑雪场、云顶滑雪场、新疆丝绸之路滑雪场、赛里木湖滑雪场均已提出试用意向,国外俄罗斯堪察加半岛和索契滑雪场也已提出采购意向. 预计未来3~5年产品年销售量在80~100台左右,年销售额在2.0~2.8亿元左右.
5. 结论
本文通过分析压雪车的发展现状,指出压雪车研发面临的四项关键技术难题、研究技术路线及任务,国内企业研制的室外大中型SG400压雪车为“十四冬”等各项冰雪运动赛事提供服务.
(1) 大中型压雪车关键部件与整机的设计制造技术已被攻克,作业精准、可靠性高、排放低的压雪装备关键技术体系已初步形成,研制的压雪车装备达到国际先进水平,形成了批量生产能力,我国大中型压雪车完全依赖国外进口的现状得到改变.
(2) 国产室外大中型压雪车自主知识产权已形成,大中型压雪车试验验证技术体系与评价指标体系已得到构建,国内相关标准的空白得到了弥补,支撑着我国冰雪装备产业良性发展.
(3) 压雪车属于工程机械的范畴,随着工程机械电动化、智能化的发展,以混合动力、纯电动、燃料电池为动力来源的压雪车代表着未来的发展趋势,而面向人机共驾、无人驾驶的压雪车则代表着智能压雪车的发展方向.
致谢:项目研究得到了北京科技大学、河北宣工机械发展有限责任公司、中国人民解放军陆军装甲兵学院、江苏大学、北京橡胶工业研究设计院有限公司、张家口市万龙运动旅游有限公司等单位参与人员的支持与帮助,在此一并表示衷心感谢.
-
![]()
图 1 国内外主要压雪车. (a)凯斯鲍尔公司PistenBully,(b)普诺瑞特,(c) ALPINE510,(d)悍牛200,(e)雪兔3X,(f)河北宣工SG400
Figure 1. Snow groomer in China and foreign countries: (a) PistenBully snow groomer; (b) snow groomer Leitwolf X; (c) snow groomer ALPINE510; (d) snow groomer HN200; (e) snow groomer snow Rabbit 3X; (f) snow groomer SG400
![]()
图 2 室外大中型压雪车研发及应用示范总体技术路线
Figure 2. Overall technical roadmap for research and application of outdoor large-and medium-sized snow groomers
![]()
图 7 室外大中型压雪车滑雪场作业. (a) 夜间作业; (b) 白天作业
Figure 7. Outdoor large- and medium-sized snow groomers operating in snow fields: (a) operation in the night; (b) operation in the day
表 1 SG400压雪车整机参数与国外同类产品对比
Table 1 Comparison of the parameters of the SG400 snow groomer developed in the project with similar foreign products
Parameter SG400 PistenBully P400 Prinoth NEW BISON Vehicle length/mm 8240 9010 8510 Vehicle height/mm 2925 2830 3048 Width (including track) /mm 4238 4206 4216 Width (including snow plow) /mm 6406 6400 6200 Snow shovel deployment width/mm 5390 5260 5360 Vehicle speed/( km·h−1) 21 23 21 Climbing ability/% 100 100 100 Engine model Cummins QSL8.9 Cummins QSL9 Caterpillar C9.3 Rated speed/(r·min−1) 2100 2100 1700 Power/kW 264( 2100 r·min−1)272( 2100 r·min−1)298( 1700 r·min−1)Maximum torque/(N·m) 1500 (1500 r·min−1)1519 (1500 r·min−1)1726 (1400 r·min−1) 下载: 导出CSV
下载: 导出CSV
-
[1] 王佳见, 苗润莲, 于怡鑫, 等. 冬奥背景下京津冀冰雪装备制造产业发展研究. 科技智囊, 2022(1):15 Wang J J, Miao R L, Yu Y X, et al. Research on the development of ice and snow equipment manufacturing industry in Beijing–Tianjin–Hebei Region in the context of Olympic winter games. Think Tank Sci Technol, 2022(1): 15
[2] 杨国庆. 习近平关于办好北京2022冬奥会重要论述研究. 成都体育学院学报, 2022, 48(1):1 Yang G Q. Study on Xi Jinping’s important speeches and statements on 2022 Beijing winter Olympic games. J Chengdu Sport Univ, 2022, 48(1): 1
[3] 本刊综合. 中国科协发布2022重大科学问题、工程技术难题和产业技术问题. 中国科技产业, 2022(7):11 Science & Technology Industry of China. China Association for Science and Technology released 2022 major scientific problems, engineering technical problems and industrial technical problems. Sci Technol Ind China, 2022(7): 11
[4] 习近平. 在全国科技大会、国家科学技术奖励大会、两院院士大会上的讲话. 中华人民共和国国务院公报, 2024(20):6 Xi J P. Speech at the National Science and Technology Conference, National Science and Technology Awards Conference, and Academician Conference of the Chinese Academy of Sciences and Chinese Academy of Engineering. Gazette State Counc People's Republic China, 2024(20): 6
[5] 孟凡生, 徐野, 赵刚. 高端装备制造企业向智能制造转型过程研究——基于数字化赋能视角. 科学决策, 2019(11):1 Meng F S, Xu Y, Zhao G. Research on the transformation process of high-end equipment manufacturing enterprises to intelligent manufacturing: Based on digital empowerment perspective. Sci Decis Making, 2019(11): 1
[6] Snowsat. Lidar, see the future [J/OL]. [2024–08–20]. https://www.snowsat.com/_Resources/Persistent/a/0/a/6/a0a627c9b3bcb24ddc934b01337abb9831fffb6e/SNOWsat_LiDAR_EN.pdf
[7] 白莎莎, 张海洋, 许世东, 等. 基于机载激光雷达点云的雪道坡度提取算法. 应用光学, 2021, 42(3):481 doi: 10.5768/JAO202142.0302005 Bai S S, Zhang H Y, Xu S D, et al. Slope extraction algorithm of ski tracks based on airborne LIDAR point cloud. J Appl Opt, 2021, 42(3): 481 doi: 10.5768/JAO202142.0302005
[8] Onesto L, Corno M, Franceschetti L, et al. LiDAR based obstacle detection for snow groomers. IFAC-PapersOnLine, 2020, 53(2): 15469 doi: 10.1016/j.ifacol.2020.12.2370
[9] 焦倩, 马飞, 王志伟, 等. 雪道点云时域波形特征分割及SLAM算法. 哈尔滨工业大学学报, 2024, 56(8):124 doi: 10.11918/202307071 Jiao Q, Ma F, Wang Z W, et al. Ski pistes segmentation and SLAM algorithm based on time-domain waveform characteristics of LiDAR point cloud. J Harbin Inst Technol, 2024, 56(8): 124 doi: 10.11918/202307071
[10] 崔玉莲, 马智萌. 大中型压雪车履带的轻量化可靠性设计. 机械设计, 2023, 40(S1):59 Cui Y L, Ma Z M. Reliable lightweight design of outdoor large and medium-sized caterpillar track. J Mach Des, 2023, 40(S1): 59
[11] Zhang F H, Chen Z H. IDDM: An incremental dual-network detection model for in-situ inspection of large-scale complex product. J Ind Inf Integr, 2023, 33: 100463
[12] Shi B B, Chen Z H. A layer-wise multi-defect detection system for powder bed monitoring: Lighting strategy for imaging, adaptive segmentation and classification. Mater Des, 2021, 210: 110035 doi: 10.1016/j.matdes.2021.110035
[13] 张强, 赵爽耀, 蔡正阳. 高端装备智能制造价值链的生产自组织与协同管理:设计制造一体化协同研发实践. 管理世界, 2023, 39(3):127 Zhang Q, Zhao S Y, Cai Z Y. Production self-organization and collaborative management of intelligent manufacturing value chain of high-end equipment: Design and manufacturing integration collaborative R&D practice. J Manage World, 2023, 39(3): 127
[14] 高士根, 周敏, 郑伟, 等. 基于数字孪生的高端装备智能运维研究现状与展望. 计算机集成制造系统, 2022, 28(7):1953 Gao S G, Zhou M, Zheng W, et al. Intelligent operation and maintenance for advanced equipment based on digital twin: Challenges and future. Comput Integr Manuf Syst, 2022, 28(7): 1953
[15] 张玺, 宋洁, 侍乐媛, 等. 新一代信息技术环境下的高端装备数字化制造协同. 管理世界, 2023, 39(1):190 Zhang X, Song J, Shi L Y, et al. Collaboration for digital manufacturing of high-end equipment in the era of new-generation information technology environment. J Manage World, 2023, 39(1): 190
[16] 杨善林, 王建民, 侍乐媛, 等. 新一代信息技术环境下高端装备智能制造工程管理理论与方法. 管理世界, 2023, 39(1):177 Yang S L, Wang J M, Shi L Y, et al. Engineering management theory and methodology for high-end equipment intelligent manufacturing in the era of new-generation information technology. J Manage World, 2023, 39(1): 177
[17] 孙宗学, 张晓莲, 周志峰, 等. 耐寒橡胶材料的研究进展. 橡胶工业, 2021, 68(6):471 doi: 10.12136/j.issn.1000-890X.2021.06.0471 Sun Z X, Zhang X L, Zhou Z F, et al. Research progress of cold-resistant rubber materials. China Rubber Ind, 2021, 68(6): 471 doi: 10.12136/j.issn.1000-890X.2021.06.0471
[18] 李西飞, 赵菊兰, 邵卓妍, 等. 液体丁腈橡胶增韧丁腈橡胶/硫酸铜复合材料的制备及再加工性能. 高分子材料科学与工程, 2024, 40(3):48 Li X F, Zhao J L, Shao Z Y, et al. Liquid nitrile rubber modified NBR/CuSO4 composites with excellent mechanical properties and cyclic processing ability. Polym Mater Sci Eng, 2024, 40(3): 48
[19] 张浩, 胡道庆, 程峥明, 等. 钢渣基盾粉/橡胶复合材料的性能及机理. 材料工程, 2024, 52(5):188 doi: 10.11868/j.issn.1001-4381.2023.000358 Zhang H, Hu D Q, Cheng Z M, et al. Properties and mechanism of steel slag based shield powder/rubber composites. J Mater Eng, 2024, 52(5): 188 doi: 10.11868/j.issn.1001-4381.2023.000358
[20] 欧阳素芳, 周道伟, 黄伟, 等. 新型耐迁移橡胶防老剂的研究进展. 化工进展, 2023, 42(7):3708 Ouyang S F, Zhou D W, Huang W, et al. Research progress on novel anti-migration rubber antioxidants. Chem Ind Eng Prog, 2023, 42(7): 3708
[21] 张宇, 刘西侠, 邱绵浩, 等. 面向履带式无人车运动规划的斜坡转向特性研究. 南京理工大学学报, 2020, 44(5):536 Zhang Y, Liu X X, Qiu M H, et al. Characteristics of ramp steering for the motion planning of unmanned tracked vehicle. J Nanjing Univ Sci Technol, 2020, 44(5): 536
[22] 张宇, 刘西侠, 李军, 等. 松软地面下履带车辆斜坡转向特性. 科学技术与工程, 2021, 21(3):1011 Zhang Y, Liu X X, Li J, et al. Ramp steering characteristics of tracked vehicles on soft terrain. Sci Technol Eng, 2021, 21(3): 1011
[23] 黄昌雄, 陈耕, 黄松华, 等. 基于SIMP-安定的高速列车组合式座椅底架轻量化设计与分析. 工程科学学报, 2024, 46(6):1151 Huang C X, Chen G, Huang S H, et al. Lightweight design and analysis of a combined seat bracket for a high-speed train based on SIMP-shakedown. Chin J Eng, 2024, 46(6): 1151
[24] 陈薛辉, 冯燕, 钱权. 差分隐私保护的随机森林算法及在钢材料上的应用. 工程科学学报, 2023, 45(7):1194 Chen X H, Feng Y, Qian Q. Differential privacy protection random forest algorithm and its application in steel materials. Chin J Eng, 2023, 45(7): 1194
[25] 郑子晗, 潘丹. 基于人机工程的压雪车驾驶室舒适性研究. 人类工效学, 2024, 30(1):77 Zheng Z H, Pan D. Study on the comfort of snowplow cab based on ergonomics. Chin J Ergon, 2024, 30(1): 77
[26] 杨威威, 罗登昊, 张文明. 基于深度强化学习算法的纯电动矿用汽车再生制动策略研究. 工程科学学报, 2024, 46(3):503 Yang W W, Luo D H, Zhang W M. Regenerative braking strategy based on deep reinforcement learning for an electric mining truck. Chin J Eng, 2024, 46(3): 503

计量
- 文章访问数: 147
- HTML全文浏览量: 15
- PDF下载量: 21
